チェーンプログラムロボット その2

冬は寒いですが春になると花粉が飛び始めるので、もうしばらく寒いままでいてほしいY研究員です。
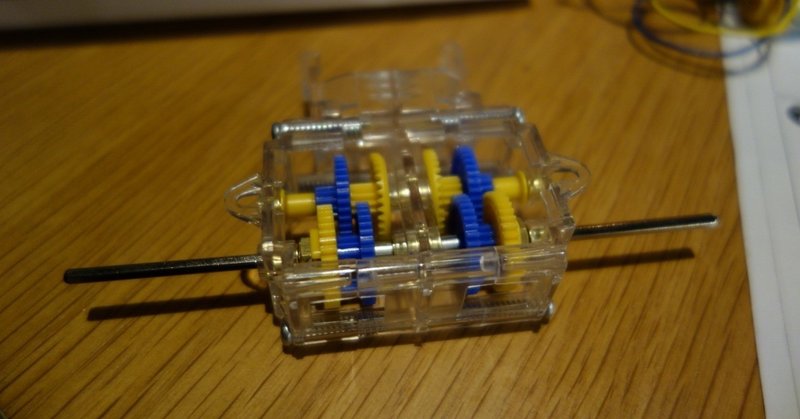
さて昨年末にふらっと教材研究と称してタミヤのプログラムロボットを買ってみました。今回はその続報です。前回は組み立てて「まっすぐ走らない!」という記事を書いたのですが、今回はとりあえずまっすぐ走るようにすこし工夫してみました。
やったことは、右手のクランクが引っかかるのでシャフトを取り外し、左右に向くコマの次に前進させても残差がのこる(すこしどっちかに曲がる)ので、切り返しを早めに入れるです。結果は、、、

まぁまぁですね。使用例としてカーブを含めたコースで走破を目指す、とありましたが「真正面にたどり着く」という課題も十分成立しそうです。コマを全部使ってという条件付きでもいいですね。
しかし考えてみると「期待通りに動かない」は「ロボット製作あるある」なので、いい勉強になると思いました。プログラミングからロボットに入ると、想定と結果の差に苦労します。いかにソフトウェアが素晴らしくて最新鋭のAIが搭載されていても、動くロボットがガタガタだと仕組みとして成立しません。
そういう場合、とりあえずセンサーとかコンピューターで補正するというのも対策の一つですが、機械的な構造を工夫したり調整をすると時間はかかりますが後から楽になる場合もあります。こういう経験をつんでバランス感覚を身につけていくと、立派なロボットエンジニアになれると思います。
というわけで「チェーンプログラミングロボット」は、「プログラミング以前にもやるべき事が有ると知る」良い「プログラミング教材」だと思いました。
さて、当研究所では横浜市の港北ニュータウンでCoderDojoを開催してプログラミング経験の場を提供しています(無料)。運営のためにCAMPFIREでクラウドファンディングしていますので、よろしければ寄付の検討をお願いします(千円から)。
これからも気になる「プログラミング教材」を試していきたいと思います。
では。
無料のプログラミングクラブCoderDojoを運営するにあたり寄付を受け付けています。お金は会場費・Wifiの費用・教科書に使用します。