自動運転の歴史は1900年代まで遡る

自動運転のナカミ②【歴史編】
この記事の目的
事故や渋滞が無くなる!運送業が効率化する!時間が節約できる!…という明るい話から、事故の責任は誰が負うの?車がハッキングされたら?AIとかロボットに運転任せるの怖い…という心配になる話まで、色々な議論がされている自動運転技術。しかしそう言った自動運転が来る来ないという議論を盛んにしている一方、自動運転がどのようにして動いているのかなどと言った中身の深いところまで詳しい方は少ないのではないでしょうか。私はというと、数年前にこの技術を知って以来すぐに進路を変え自動運転研究室に入ったり、研究室入る前から有料オンライン講座(計約30万円…汗)で学んだりと、この業界のキャッチアップに勤しんできました。そこでこの記事を通して自動運転技術の中身を噛み砕いて紹介することで、より一層深い議論ができたり、この産業に張るか張らないかを考えて頂けたらなと思います。
前回は【TED Talk編】でしたね。第2回目の本記事では、そもそも自動運転という考えがいつ頃から出てきたのかという歴史のお話をしようと思います。
1900年代
まず一番最初に自動運転の考えが出たのは遡ること紀元前130年です。当時の人々は、好きな場所へ一瞬で移動できたらな、と考えていました。

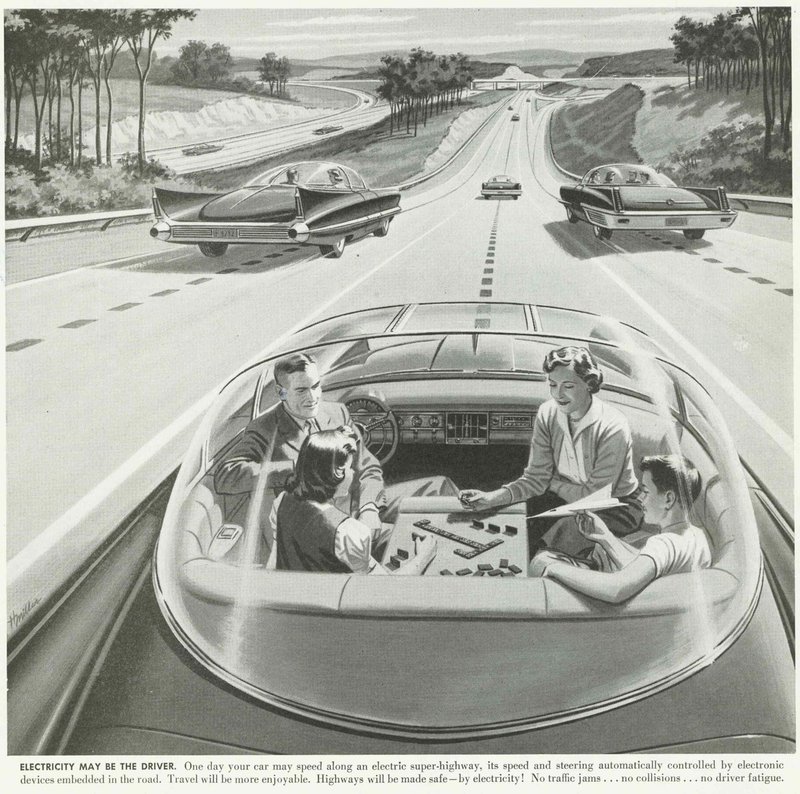
というのは冗談で、1950年の雑誌に既に下図のような絵が掲載されており、ということは少なくとももっと前から自動運転”乗用車”という夢は浮上していたのでしょう。
そして同年代では既にGMが実用化に向けた試験を行なっていました。そのアイデアは道路に鉄線を埋め込み、自動車側に搭載した磁器で追うというものでした。
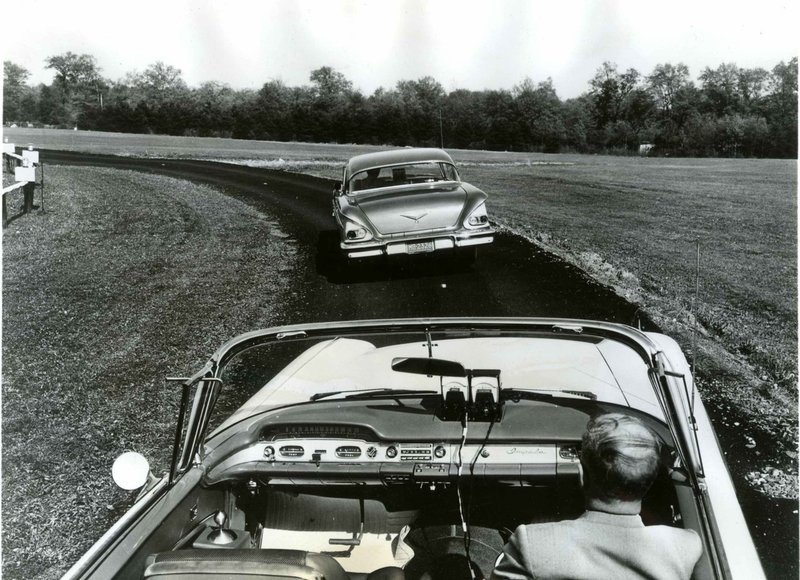
対応している高速道路までは普通に運転し、高速道路を降りるまでは手放しでいられる…しかしこれは道路という既存インフラを全て引っくり返さなければいけないという莫大なコストがかかるため断念されました。まあこれと似たような事を実現しようとしているのがElon Muskですが。
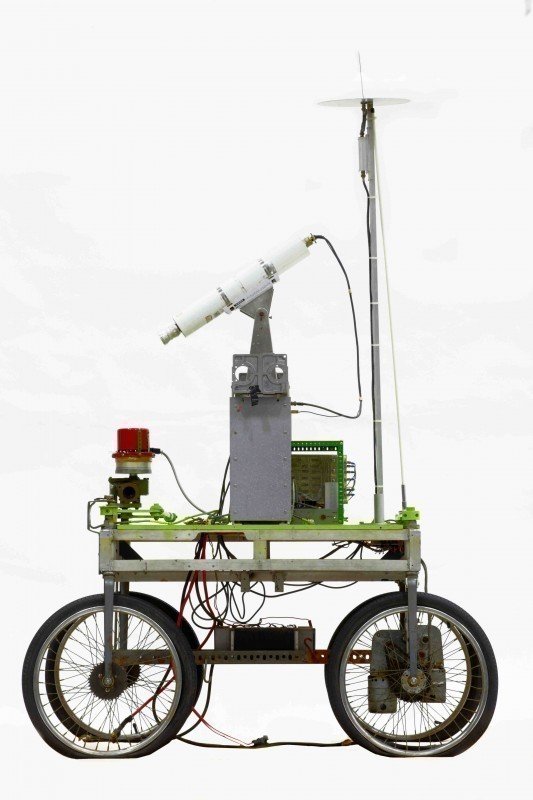
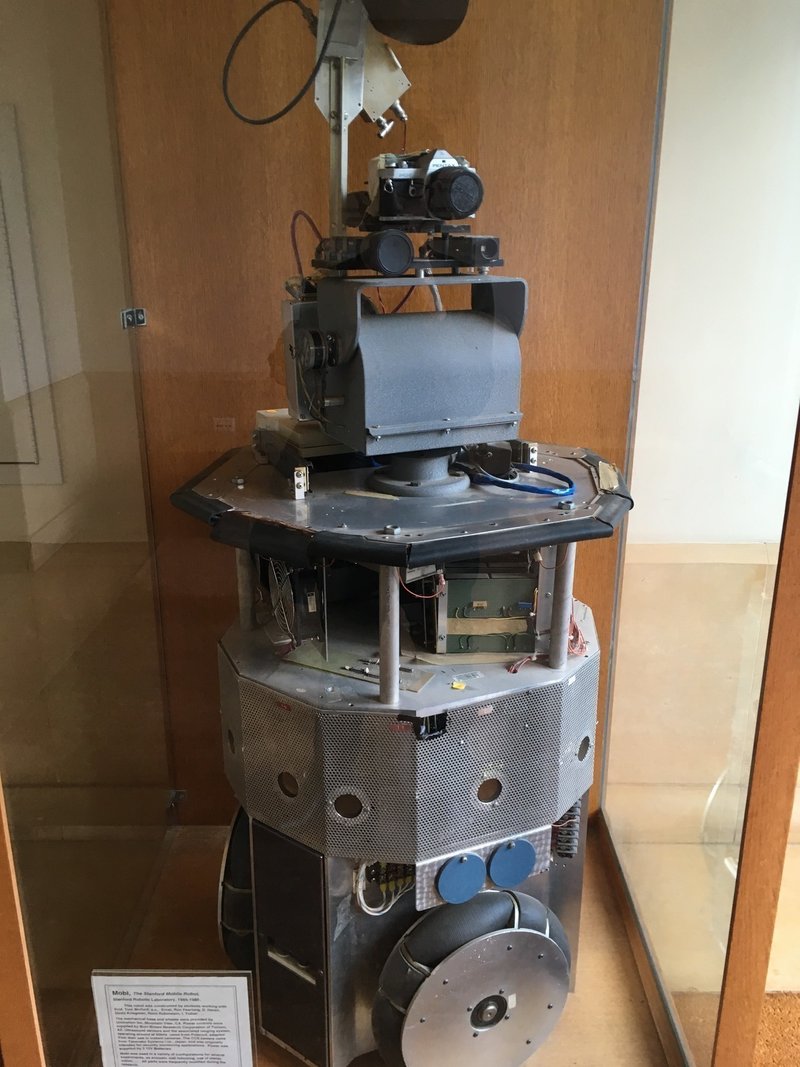
少し進んで1960年代、米スタンフォード大学のAI研究室がAIと画像処理を用いた自律走行ロボットを開発しました。これが今後の自律走行の原型になって行きます。50年以上も前のこの頃からAIを研究してたんですねえ…そりゃスタンフォード大凄いわ。
自動運転は大きく分けて3つの工程から成り立っています。
1. 周辺認識
2. 状況判断
3. 車体制御
です。まずカメラ等のセンサーで周辺環境を「1. 認知」して、その情報からどこに障害物があってどこが走行可能か「2. 判断」し、設計された経路に従って滑らかに走れるように車体を「3. 制御」します。この時代のボトルネックは「2. 判断」の部分だったようで、だからこそそこにAIを使おうという発想でした。この自律走行ロボットはアップデートを重ね、よりゴリゴリになっていきます。
1970年代、世界に先駆けて一足先に日本は筑波大学が自動走行可能な車両を発表。画像処理により白線に沿って走る(時速約30km)という仕組みでした。

更に進んで1980年代、今度はドイツで自動運転技術が大きく進歩します。ドイツ人研究者があのベンツを提供しているメルセデスの車を丸ごと改造して、無人運転の実験に成功しました。

まるでサーバー室かのように車内全体がコンピュータでいっぱいです。この研究室とメルセデスは2000年代までモデル改良を行い、最終的には普通乗用車モデルによる公道実験まで果たしました。
上の動画を是非見て頂きたいのですが、いやもうこれでいいんじゃないかと思うくらい完成度が高いです。
2000年代
このように2000年に入る前から自動運転技術自体は世界中で研究されていましたが、2000年代に入ってからブームに一気に火がつきました。そのきっかけとなったのが米国で開催されたDARPAチャレンジという、世界初の自動運転技術を競い合う大会です。
DARPAグランドチャレンジと名付けられた第一回目大会の開催は2004年。アメリカの広大な砂漠を貸し切り、日本で例えると東京〜静岡間の距離のコースを走り切ったチームには$100万ドルの賞金が与えられるというもの。もう、規模がいきなりビックですね…だって、コケるかどうかもわからない企画の初回からこの規模ですよ?流石アメリカ。それで結果はというと…
誰も完走できませんでした。
まあ一発目ですからね。一番健闘したのはあのコンピューターサイエンス学科が有名な米カーネギーメロン大学のチームで、DNAが0と1で書かれてるんじゃないかと噂されるほどのCMUコンピューターサイエンス学科の学生を持ってしても、全コースの5%も自動走行できませんでした。

初代Sandstorm号
当然賞金はお預け、次大会へキャリーオーバーとなりましたが、なんと次の開催は翌年(!)コース全体の20分の1も走行できなかったというのに1年後にはちゃんとできるように用意してこい、と。流石アメリカ。それで翌年2005年に再度DARPAグランドチャレンジが開催されることとなりました。更に意地悪なことに初回大会からコースは変更され、急カーブが増え道幅は狭くなりました…。
しかし第二回目大会は大盛り上がり!なんと、昨年と打って変わって5チームもがコース完走を果たしたのです!そしてその中でも1位のチームは、
あのスタンフォード大学のAI研究室
でした。50年以上も前からAIの研究を重ねてきた成果が$200万ドルと一緒に返ってきました。この時スタンフォードAIラボチームを率いていたのが、前回記事【①TED Talk編】でスピーチしていたセバスチャン・スランです。

Stanley号(左青) / H1ghlander号(真ん中赤) / Sandstorm号(右赤)
そして2位と3位にカーネギーメロン大学から2車両がランクイン。実は優勝チームを率いたセバスチャン・スランは、このカーネギーメロン大学を率いたレッド・ウィッテイカー教授の下で働いていた元研究員で、スタンフォード大学のStanley号が臨時トラブルで止まっているカーネギーメロン大学のH1ghlander号を後ろから抜いた時は大層盛り上がっていました(笑)↓
44:25ら辺からのシーンですね。上記動画はこのDARPAグランドチャレンジのドキュメンタリー番組で、非常に胸熱な動画なので是非お時間がある時に見てみて下さい。
2007年、DARPAアーバンチャレンジと名付けられた次の大会は今までと違って砂漠ではなく市街地を想定したテストコースにて行われ、実際の交通規制に則したルールが課せられました。今度は空軍基地を貸し切り…流石アメリカ。信号機の色はもちろんのこと標識にも(リアルタイムで)従わなくてはならないため、グランドチャレンジではハードウェアに注力しなければいけなかったのに対し、アーバンチャレンジはよりソフトウェアに比重が置かれました。
全チーム事前にある程度の精度の地図データは渡されていましたが、大会前にその地図データに改良を加えていたカーネギーメロン大学のチームが今度は優勝に返り咲きました。そして2位にスタンフォード大学が続き、他にもMITのチームが完走を果たしました。

Boss号 from カーネギーメロン大学

Junior号 from スタンフォード大学

Talos号 from マサチューセッツ工科大学
今日
そして2010年代今日、皆さんがよくニュース等で見かける様に、自動運動技術の発展は目覚ましいものです。そのブレイクスルーの一旦を担っているのが、これまた昨今話題のディープラーニングによる画像認識技術の発達です。
もう至る所で目にするのでわざわざ画像を添付しませんが、TOYOTAやTeslaと言った自動車メーカーはもちろんのこと、GoogleやBaiduと言ったIT企業から始まりUberやLyftなどのライドシェア産業からも続々プレイヤーが集まって来ています。
さらに面白い事に今の時代、自動運転技術をオンラインで学べちゃうんです。冒頭でも書きましたが僕が受けた授業はこれです(クソ高い)。
更に手厚い事に、もうちょっと初心者向けの短期間コースまでも用意されています。
それほど求人が追いついていないという事なんでしょうね…益々盛り上がる自動運転産業です。
では次回は自動運転の【仕組み編】を書こうと思います。
文:川西発之 / 陳発暉 (Twitter/note)
プロフィール:Deep4Drive開発メンバー。高専情報科(C/C++)→大学機械科→HWエンジニアインターン at ドローンベンチャー(Python)→SWエンジニアインターン in NY(PHP)→ニートしながらアプリ開発(React Native)→大学院で自動運転の研究(C++)。日本生まれの純血中国人🇯🇵🇨🇳
私たちはモビリティ分野でのオープンイノベーションを通じ、技術者を育成するコミュニティです。自動運転レースへの挑戦や、JR東日本様等との共同プロジェクト、新規価値創造等を行っています! モビリティに関するイベントも適宜開催中!