パイナポーの直動スライダー脚奮闘記

どーも、かわロボアドベントカレンダー14日担当のパイナポーです。
初めてこの記事に来てそれはなんぞや?となった方はこちらのポストを参照してください。(https://x.com/sin1west/status/1720018983200682053?s=20)
今回、自分が語りたいのはかわロボの直動スライダー脚についてです。
絶滅危惧種・走れない脚と言われる中なぜそれを作るに至ったか、メリットはなんなのか、私=パイナポーのかわロボの軌跡をお見せしながらご紹介しましょう。
…と言っても長くなっちゃいそうなので、先にメリットだけ言っちゃいます!
構造が単純で壊れにくい
形が左右対称なので組み間違いしづらい
転倒スタートの時に立たせやすい
設計に時間がかからない(アームなどの設計に時間を割ける)
スライダ軸と回転軸の間をつめれば走破性のいい脚になる
とまあこんな感じです!
では実際の機体や製作の経緯について語ります!
序章 〜その スライダーの出逢いは...〜
時は2015年、まだパイナポーがパイナポーと呼ばれていなかった頃…
まだ青いパイナポーはRRST新入生として、本大会に向けた加工や組立、操縦の教育を受けていました。そこで出会ったのが初めて触った機体「麟」(ユニコーン)です。
完全勝利BGMが聞こえてきそうな、可能性を感じる名前ですね!

麟は直動スライダー脚のシンプルなミドルロッド機でした。先輩の丁寧な教えもあり、かわロボの基礎を学ぶにはいい機体だったなと思います。それでは脚について見てみましょう!
麟のスライダー脚の特徴
Linksで見るとこんな感じ。

スライダー脚のLinks自体見たことない人もいるのでは?(レバー長さを0にすればこうなります)
麟の脚のメリット、デメリットがこちら↓
メリット
脚が1枚のアルミ部品だけで済む
ヘッケンの回転軸の破損やリンク反転が存在しない
前後の脚ユニットが全く同じなので組み間違いがない
脚の形的にスタート時立たせやすい
デメリット
脚があまり上がらず、すり足気味
t3アルミ脚なので足裏が剥がれやすい
足裏が薄いゴムスポンジなので滑りやすい
教育中、他のヘッケンクランク脚でよく起こっていたのがヘッケン接続部の破損やリンクの反転による動作不良。
スライダー脚だとそういう動作不良がなく、とてもストレスフリーに感じました。しかし一方で、走行性の面で問題は沢山。
なのでこれらの克服をめざし、パイナポーの奮闘記が始まります!
1章〜初製作機体「漸」登場!〜
初機体として自分が作ったのはスライダー脚のパイプ横回転で、部内にノウハウが少なかったこともありアームの設計にかなりの時間がかかることが予想されました。そこで役に立ったのがスライダー脚の設計の早さです。
そんなこんなでできた最初の機体、「漸」(ゲブンドゥール)がこちら!

漸のスライダー脚の特徴
こちらが漸のLinksです。調整するのは基本的に「クランク半径」「スライダY座標」「最適化曲線高さ」のみ。ね、簡単でしょう?
これらのパラメータ含め、先ほど挙げた麟の脚のデメリットをなくすべく設計を改善しました!


改善した点
クランク半径、回転中心高さ(最適化曲線高さ)を大きくして、脚が高く上がるようにした
接地部にt3ポリカ(画像中青パーツ)を取り付け脚幅を増やしてグリップを強化した
これでかなり走りが改善しました。設計時間もそんなにかかっていません。
1.については回転中心高さ65mmに対しそれを上回るくらいに脚が上がっています。2.については、かなゴン先輩の蛤などがやってるのを真似しました。
しかしLinksの軌跡を見ると平たい半円状で、走るとまだすり足気味。旋回するときに引っかかったりしてました。
ここからさらに脚のパラメータを改善していきます。
2章〜誕生!2機体目のスライダー「冥」!〜
2機体目の「冥」(ヨモツヘグリ)は漸のマイナーチェンジ機体です。
ではLinksとCAD画像を見ながら特徴を見てみましょう!

冥のスライダー脚の特徴
冥はデザインと機能性の両立を求めた機体でした。仮面ライダー龍玄・黄泉 ヨモツヘグリアームズ(早口)のモチーフを入れつつさらに走破性のある足を目指しました。


改善した点
最適化曲線高さをさらに高く大きな脚にした
回転中心とスライダ軸の距離(スライダY座標)を短くした
足裏をシリコンにした
脚の肉抜き、t3ポリカパーツをかっこよくした
1.に加えて効いたのが2.の改善です。ここを縮めることでかなり脚が高く上がるようになりました。Linksの軌跡をみれば、漸までの半円に近かった形から、ブーメランのような軌跡に変わってきたのがわかります。
走破性はだいぶ良くなりましたが、デザイン優先したのもあってかなり重量のある脚になってしまいました。次はその改善です。
3章〜次に生まれ変わるとしたら、「鳳」になりたいな〜
3機体目「鳳」(フェネクス)ではRRST初の上下動がついた横回転になります。そのためには脚の軽量化が必須。軽く、かつ冥と同等の走破性の脚を目指しました。
この機体で初の本大会決勝に進むことになりますがそれはまた別の機会に話します。

鳳のスライダー脚の特徴
とにかく軽くすることと、いい脚になる条件を見定めることが鳳の脚の目標でした。


改善した点
脚がでかくなる要因の回転中心高さをちょっと低くした
脚をT字に近い形に戻し、細めの側板でも剛性が保てる軸配置ができるようにした
設計当初、1.によって脚が小さく軽くなる一方、走破性が損なわれないか心配していました。しかし、Linksの軌跡を見るとブーメラン状軌跡で脚が高く上がっており、スライダ脚の走破性には回転中心高さよりスライダY座標が支配的なことがわかりました。
大事なパラメータがわかってきたので、ここからは機構の改善も入れていきました。
4章〜機構進化!「鴉 Blizzard」!!〜
4機体目の「鴉 Blizzard」(ラウム ブリザード)では、その頃どの団体でも定着し始めたサスペンションを取り入れました。さらにこの黒い脚は…なんとジュラコン製です。

鴉 Blizzardのスライダー脚の特徴
鴉 Blizzardでは横回転機構がかなり軽量化したので、鳳ほど脚の重量は気にしていません。Linksと脚のアップ写真がこちら。


改善した点
回転中心高さは大きめに戻した
脚をジュラコンで作り、回転部のブッシュをなくして部品点数を少なくした
サスペンションを取り入れて走破性を上げた
1.と3.の効果は言わずもがな。
今回の特殊な改善は2.です。従来の脚はアルミで作っていたため、回転部に小さいブッシュが必要だったり、スライダ部分は軸側が削れたりといったことがありました。
そこで、脚自体がジュラコンなら潤滑性があるのでその辺改善できるんじゃないかと思いやってみました。足が1枚で済むスライダー脚ならではです。
試した結果、強度面は問題なかったですが、接着性が悪いかつ旋回の動きによって足裏の剥がれが多発しました。とくに後ろ脚。走破性の次は旋回性が欲しくなってきました。
5章〜Yo! Say! オムニ脚魅惑の「凰 Revolution」〜
学生最後に作った機体が「凰 Revolution」(カイム レボリューション)です。
研究生活との両立のため設計時間のかかるサスは入れず、そのかわり旋回性能を求めて後ろ脚にオムニ脚を採用しました。前足は鴉と同様、ジュラコン脚です。

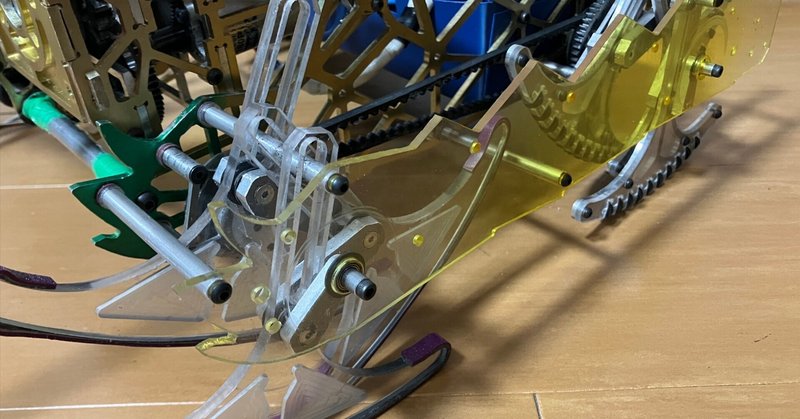
凰 Revolution のスライダー脚の特徴
Linksと実際の脚がこちら。パラメータとしてはこれが最終形態、最善と思っています。サムネの最新機体「凰 arms」(パイナポーアームズ)も同じ脚になります。



改善した点
後ろ脚をオムニ脚にした
スライダY座標をさらに縮めた
1.の効果はというと、個人的にはかなりあったなと思っています。強度面でもスライダ脚なら単純に板2枚で作れるので、オムニにするために応力が集中するような段差を作らなくていいのは利点です。
2.は縮めていくと脚が上がる一方、スライダ溝と回転部の間の肉がどんどん薄くなってしまうので、このパラメータがいい具合かなと思ってます。
ここまで来てどれくらいの走破性になったかというと、実例で言うなら今年の電大杯のリングを難なく走れるくらいの走破性です。このおかげで電大杯では好成績を納められたと思っています。
最終章〜終わらない明日へ〜
いかがだったでしょうか。アームや戦い方の性質上、待ちで山挟んで旋回しながら戦うスタイルを想定して発展させていきました。最後に改めて、直動スライダー脚のメリットとおすすめポイントを!
組み間違いしづらい、スタート時立たせやすい、設計が簡単、なので初心者が扱いやすい。特に中大型機体向き。
スライダY座標を小さくするとかなり高く上がる脚になるので、走破性は良くできる。
構造が単純なので、アイデア次第で応用がいろいろできる。

以上になります。これで読んだ方はみんなスライダー脚が作りたくてたまらなくなったかと思います。いや、すでに直動スライダーに足を踏み入れている人は沢山いるのです。横回転や回転シールドを作っているあなた、そう、あなたです。
実はスライダーY座標をさらに縮めて3mmほどにすると、無限回転アームの軌跡になります。最終的に円軌跡になるのだから、スライダーY座標を縮めて脚が上がるようになるのは納得ですよね。
紹介した機体に関しては他にも語りたいこといっぱいあるので、また記事書こうと思います。
最後まで読んでいただき、ありがとうございました!

この記事が気に入ったらサポートをしてみませんか?