Maker Faire Tokyo 2019での無線対策

Maker Faire Tokyo 2019では、AIカーでRCカーを走らせよう! コミュニティで、ブースを運営を手伝う予定です。
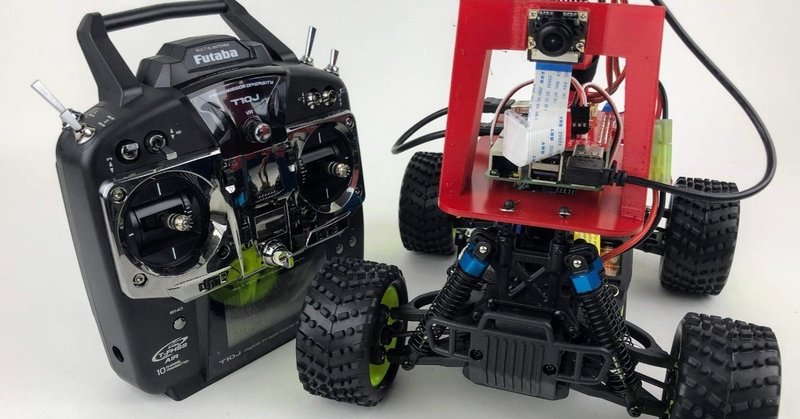
DonkeyCarは、RaspberryPi3ベースで、2.4GHz帯の無線を用いて、SSHでログインしてコマンドを実行します。また、DonkeyCarの車体の操作には、F710というWireless Joystickを用います。
抱えている問題
RaspberryPi3の2.4GHz帯WiFiと、F710のWireless通信がMaker Faire Tokyo 2019の会場では不安定になるため、この部分の対策が必要です。
2.4GHz帯WiFi問題の対策案
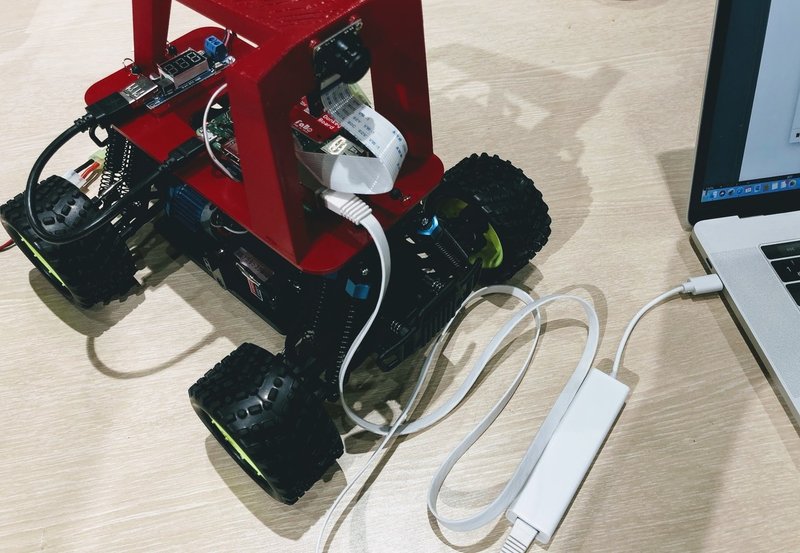
RaspberryPi3へのログインは、PCとDirectにEthernetで接続します。
Macユーザは、Bonjourがはいっているので、この方法で、Host名でDonkeyCarを発見できます。
ssh pi@donkeypi.localWindowsユーザは、iTunesをインストールすると、Bonjourも一緒にインストールされ、DonkeyCarをHost名検索できるようです。
次に、DonkeyCarの起動時には、コマンドの最後に&をつけてプロセスをバックグランド起動すると、Ethernetケーブルを取り外しても、プロセスが残るので問題なく走行できるようになります。
python manage.py drive --js &プロセスを切るには、pkillコマンドを使うと楽にプロセスを落とせます。
pkill -f manage.pyF710のWireless通信の対策案
F710は、 Unifyingという独自のプロトコルで、USBドングルとJoystick間でネットワークを構築します。DonkeyCar界隈では、すぐ接続して、操作性もわるくないという事で、支持されているJoystickです。その一方で、Maker Faire Tokyoでは、F710が不安定になると思われます。これは、Unifyingのプロトコルの問題であり、対処方法が存在していない感じです。
そこで、今回は、プロポとプロポのレシーバーの先に、Arduino Microをつなぎ、Arduino MicroでHIDプロトコルを用いてF710をエミュレートするハードウェアを作成しました。

車体には、マジックテープで貼り付けます。
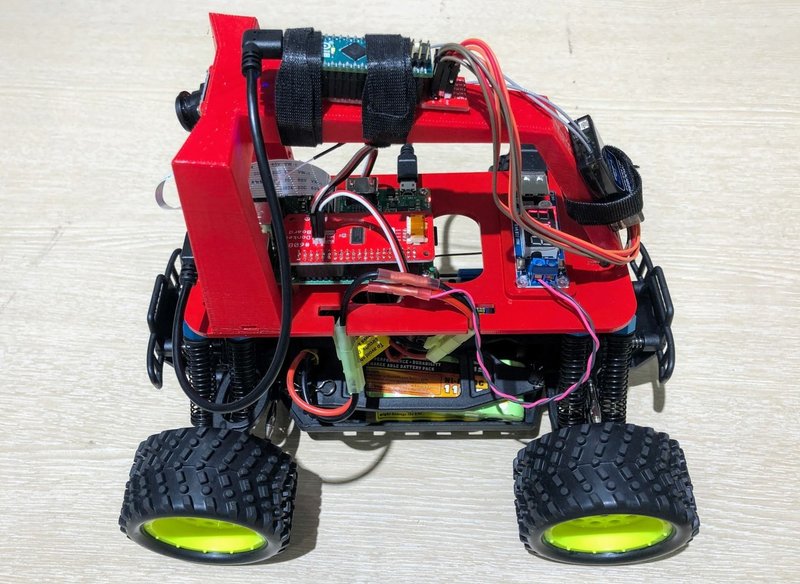
これでDonkeyCar本体は一切改造せずに、プロポから操作できるようになります。
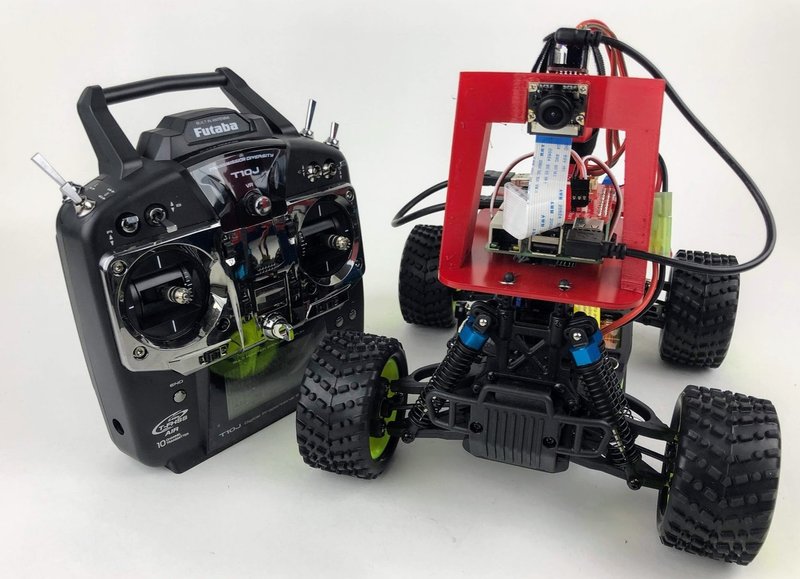
プロポは、3ch以上に対応したプロポを選びます。左右、前後、学習済みモデルを呼び出すために用います。
機種名 メーカー プロトコル チャンネル数 本体価格
T10J Futaba T-FSHH 10ch 38,000円
3PV Futaba T-FSHH 3ch 13,800円
エクスペックGT-I Tamiya FSHH 3ch 12,800円
MX-6 SANWA FH-E 3ch 11,800円
Arduino Microは、HIDに対応しているので、下記ライブラリを使用します。
Arduinoのスケッチは以下の通りです。
#include <Joystick.h>
#define NUM_BUTTON 32
#define PIN_X 0
#define PIN_Y 1
#define PIN_AI 2
#define BUTTON_ESTOP 1
#define BUTTON_ERASE 3
#define BUTTON_AI 9
#define BUTTON_MODE 10
Joystick_ Joystick = Joystick_(
0x03, // reportid
JOYSTICK_TYPE_GAMEPAD, // type
NUM_BUTTON, // button count
0, // hat switch count
true, false, false, // left x,y,z axis enable
false, true, false, // right x,y,zaxis enable
false, // rudder enable
false, // throttle enable
false, // accelerator enable
false, // brake enable
false // steering enable
);
byte PWM_PIN[5] = {A0, A1, A2, A3, A4};
int value[5] = {0,0,0,0,0};
int base[5] = {0,0,0,0,0};
boolean toggle_num[NUM_BUTTON];
int WIDTH = 410;
float joystick[5] = {0,0,0,0,0};
boolean DEBUG = true;
boolean SUCCESS = false;
void setup() {
// Serial for DEBUG.
Serial.begin(9600);
// setup pin mode.
pinMode(13, OUTPUT);
pinMode(PWM_PIN[PIN_X], INPUT);
pinMode(PWM_PIN[PIN_Y], INPUT);
pinMode(PWM_PIN[PIN_AI], INPUT);
delay(100);
// Initialize joystick.
Joystick.begin();
Joystick.setXAxisRange(0, 100);
Joystick.setRyAxisRange(0, 100);
// Initialize button.
for(int i = 0; i < NUM_BUTTON; i++) {
Joystick.setButton(i, false);
toggle_num[i] = false;
}
// Get base value.
for(int i = 0; i < sizeof(PWM_PIN); i++) {
base[i] = pulseIn(PWM_PIN[i], HIGH, 29412);
}
// Check servo signal.
if(base[0] > 100) {
digitalWrite(13, HIGH);
SUCCESS = true;
}
}
void loop() {
for(int i = 0; i < sizeof(PWM_PIN); i++) {
// Get pwm values.
value[i] = pulseIn(PWM_PIN[i], HIGH, 29412);
// Map for button
if(i >= 2) {
joystick[i] = map(value[i], long(base[i]), long(base[i] + WIDTH * 2), 0, 100);
}
// Map for axis
else {
joystick[i] = map(value[i], long(base[i] - WIDTH), long(base[i] + WIDTH), 0, 100);
}
if(DEBUG) {
Serial.print(joystick[i]);
Serial.print(",");
}
}
if(DEBUG) Serial.println();
// F710 emulation.
//
// F710 Arduino Micro
// XAxis XAxis
// YAxis RyAxis
//
// F710 Arduino Micro
// E-stop 1
// erase 3
// ai launcher 9
// mode 10
// constant_throttle 11
//
if(SUCCESS) {
// XAxis
Joystick.setXAxis(joystick[PIN_X]);
// YAxis
Joystick.setRyAxis(joystick[PIN_Y]);
// Button
check_button(PIN_AI, BUTTON_MODE);
}
}
void check_button(int pin_num, int button_num) {
if(joystick[pin_num]>50){
if(!toggle_num[button_num]) {
toggle_num[button_num] = true;
Joystick.pressButton(button_num);
}
} else {
if(toggle_num[button_num]) {
toggle_num[button_num] = false;
Joystick.releaseButton(button_num);
}
}
}
PlanBの必要性
PlanAは用意できましたが、PlanBも案だけ考えています。2.4GHz帯がまったく使いものにならない場合、SubGHz帯に逃げるというプランもあります。これがPlanBです。
PlanBはLoRa Moduleを用いて通信します。SubGHz帯なので、2.4GHz帯で抱えている問題の根本的な解決につながります。

HSPの車体に付属しているプロポの通信関連基板をとりはずし、LoRa基板に取り替えます。これで、LoRaプロポのできあがり。

PlanC
PlanAもPlanBもだめな場合は、最終手段の有線接続です。F710もプロポもLoRaも諦めて、有線JoystickのF310で操作します。DonkeyCarを追いかけて人間も一緒に走り回らないといけないので、本当に最終手段です。
最後に
Maker Faire Tokyo 2019のAIカーでRCカーを走らせよう! ブースでは、日本中からAIカーに魅了されたフルスタックエンジニアが集結します。AIカートーナメントや子供 vs AI、JetBotデモ走行をおこなう予定です。皆様のご来場をお待ちしております。
この記事が気に入ったらサポートをしてみませんか?