
ロケットの自律飛行安全の話

ロケットは自爆装置がついている。
もしくはこれ以上飛んでいかないような仕掛けが組み込まれている。モデルロケットではなく本格的なロケットに限るが、想定外の場所に飛んでいくと大事故に繋がるので、事故防止のために厳重に入念に丹念に慎重に安全装置として飛行中断する機能が組み込まれている。
そういう飛行中断機能も含めて周りの安全を守ってあげることは政府の目も入れる必要があるので(一定のところから)許認可事項になっている。日本語だと飛行安全とか地上安全という専門用語になる。打上げ安全とか保安とか色々な言い方があるが、英語だとRange safetyと言われる分野。
飛行中断システムの従来と今後
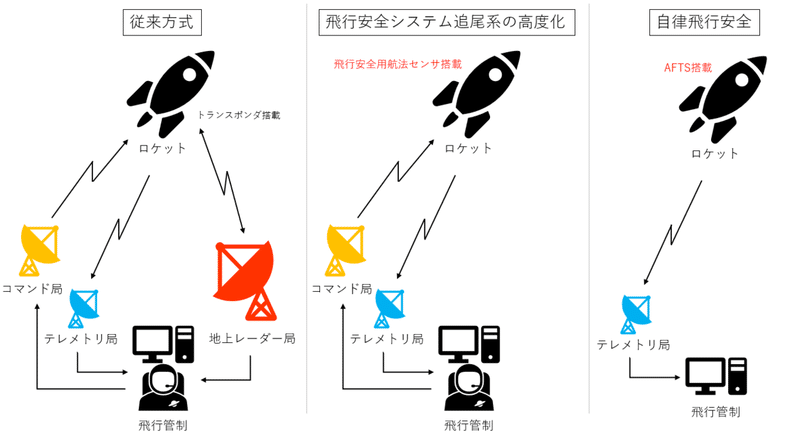
従来はロケットが「どこを飛んでいるのか」をレーダーで把握をし、「状況を判断」のためにロケットから送られてくる無線をテレメトリ局で受信し、飛行管制官が判断し、「異常時には停止」するために地上からコマンド局を通して無線で信号を送ることをしている。
この従来のRange safetyは大変すぎる。とにかくたくさんのお金がかかる。運用だけでもアメリカで軍の用途だと100人規模が付く。安全のためなので信頼性が重要であり、機器を冗長にしたり作り込みや試験が半端ない(らしい)。
アメリカでは従来型の飛行中断システムを一気に進化させた。これを「自律飛行安全」と呼ぶ。英語だとAutonomous Flight Termination System(AFTS)などと呼ぶ。
日本では段階を踏んで現在進行系で進んでいる。
第1段階として、H-2Aロケットでは「どこを飛んでいるか」をロケットに搭載している航法センサに置き換えた。航法センサというのはGPSと加速度センサ・ジャイロセンサを組み合わせたもの。アメリカだと従来のトランスポンダだけでも1000万円ほどするようなのでコスト削減の効果は大きい。地上設備のレーダーも新規に作ると数百億円、設備更新だけでも数十億円。
第2段階の自律飛行安全の段階では「状況を判断」はロケット搭載のコンピュータが実行し、「異常時には停止」もコンピュータが実行する。人間は不要になる。
自律飛行安全の体制までいくと非常にシンプルになる。高信頼に作らなくてはいけないものはロケット搭載のAFTS(自動飛行中断装置、もしくは自律飛行安全装置)だけになる。
自律飛行安全ができると「コスト削減」「打上げ場所や設備に縛られない運用が可能」「打上げ機会の増加(人間の判断よりコンピュータが早いことから余計なマージンが無くて済む)」「Falcon Heavyのように複数の機体が同時に飛んでいったり帰ってきたりするときも安全を担保できる」というメリットがある。
アメリカの現状
メリットが大きいので、NASAは2000年から検討開始し、DoD(国防省)と2002年からパートナーシップを組んだ。国策としてやっていて、ガチガチの輸出規制の中で、開発をしてきた。NASA開発のAFTSはアメリカの40の企業と政府機関に技術移転がされている。SpaceXはNASAのものをカスタマイズして使い、Rocketlabはそのまま使うことで実用化している。それ以外にもULAやBlue Originも使うと言われている。
アメリカでの自律飛行安全の開発の経緯
・2005年:飛行機を用いた試験@KSC(ケネディ宇宙センター)
・2006年:Terrier Orion観測ロケットでの実験@WSMR(ホワイトサンズミサイルレンジ)
・2007年:SpaceX Falcon1に搭載
・2007年:戦闘機F-104での飛行試験@KSC
・2010年:観測ロケットでの試験@WFF(ワロップ飛行施設)
・2013年:Minotaurロケットに搭載
とDARPAの予算を用いて飛行実証の機会を得て、着実に実績を積んできている。
アメリカでのAFTS
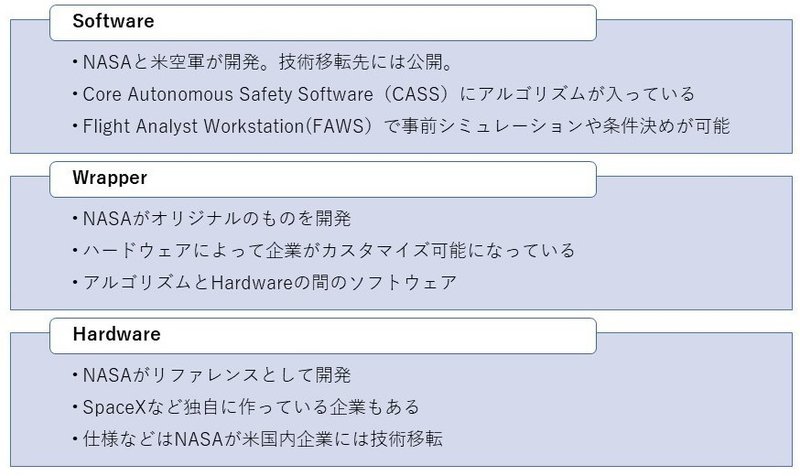
ソフトウェアは政府(NASAと米空軍)が開発し、技術移転先の米国企業には技術移転として利用許諾を出している。ハードウェアはリファレンスとしてNASAケネディ宇宙センターが開発している。そこは企業によってカスタマイズ可能になっていて、ソフトウェアとハードウェアをつなぐ部分はWrapperということで切り分けられている。CASSを使うことでアルゴリズムの担保をして、あとは自由にやらせるという方式になっている。
アメリカでのAFTSの概要
•1.3kg以下
•28V DCで7W未満
•5cm X 14cm X 19cm
•28V DCでON/OFF信号または最大5.5Aを出力
•重要回路でMILスペック部品を使用
•空軍 / NASA / FAAのRange safetyの要求を満たす。
•最大5つのセンサ(GPS or INS orGPS/INS)を入力可能
NASAのAFTSの外観
AFTSの主な要求
•単一故障点なし(AFTSユニットが一つなのは例外)
•不注意による飛行中断を防止
•95%の信頼区間で0.999の信頼性
•RCC 319-14 FTS commonality standard
•RCC 324-11 GPS and IMU range safety sracking sytems commonality standard
•AFSPECMAN 91-710 range safety user requirements
日本では
アメリカのAFTSは厳しいITARという輸出規制の中だけで使うつもりのようで輸入するのは極めて難しそうである。ロケットの低コスト化には非常に重要な技術であり、これを持っているのと持っていないのとでは圧倒的にコスト競争力に差が出る。ということで、日本では遅れながらもJAXAが飛行安全用航法センサ(RINA)の開発をしたり、経産省が「宇宙産業技術情報基盤整備研究開発事業」という事業で2018年度から自律飛行安全の開発を実施している。実際に動いているのはJAXAなどのようである。(関係者に直接聞いていることもあるけど書けるのはこのぐらい)
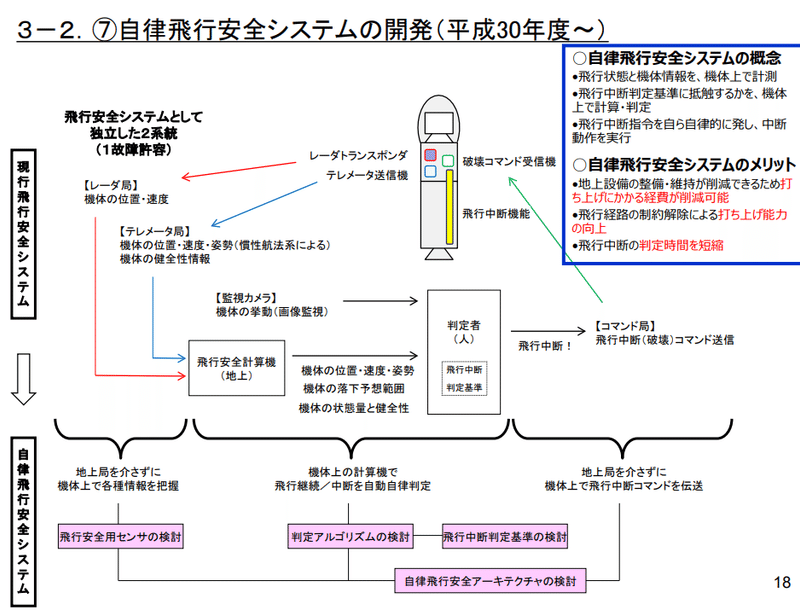
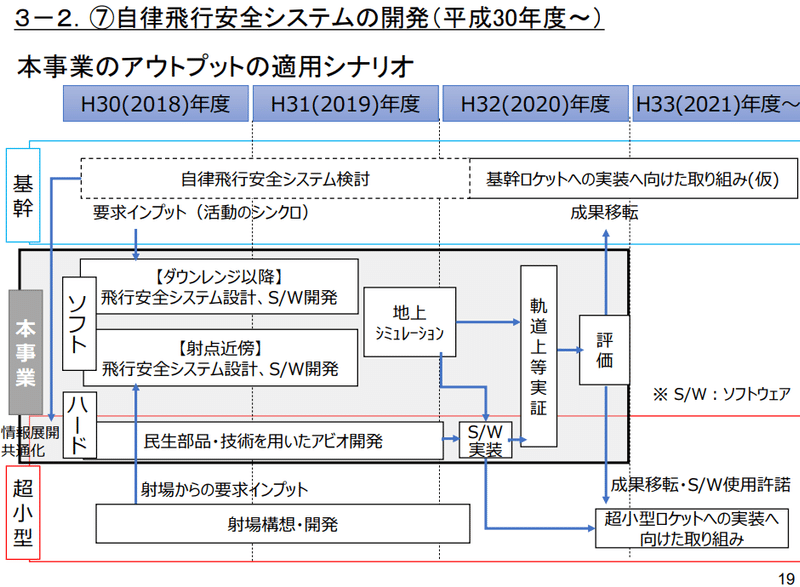
宇宙産業技術情報基盤整備研究開発事業(民生品を活用した宇宙機器の軌道上実証)の概要(中間評価)より
まとめ
NASAや米空軍が競争力強化のためにやってきたことで、重要だからちゃんと日本で自由に使える技術として獲得していけると良いよね、っていう話でした。
参考文献
・James Bull et al, An Autonomous Flight Safety System, AIAA Missile Sciences Conference, 2008
・Lisa Valencia, Autonomous Flight Termination System (AFTS), 59th CGSIC Meeting, 2019
・RCC(Range Commander Council)の公開ドキュメント
・NASAケネディ宇宙センターのNASA Range Flight Safety Program
この記事が気に入ったらサポートをしてみませんか?