AliExpressで売ってる300kgf.cm~500kgf.cmのサーボをダメ元で試してみた結果、やっぱりダメだった

はじめに
AliExpress(以降アリエク)という中国のAmazonみたいな通販サイトがあり、いろんな物を売っている。ロボット用に使えそうな大き目のサーボも売っているようなので、「使い物になればラッキー、たぶんダメだろうけど一応確認しておこう」というスタンスで買っていろいろやってみました。
結論から言うと、用途によっては使えなくはないと思いますが、少なくとも歩行ロボットの脚部に使うのは厳しそうだな、という結論に至りました。
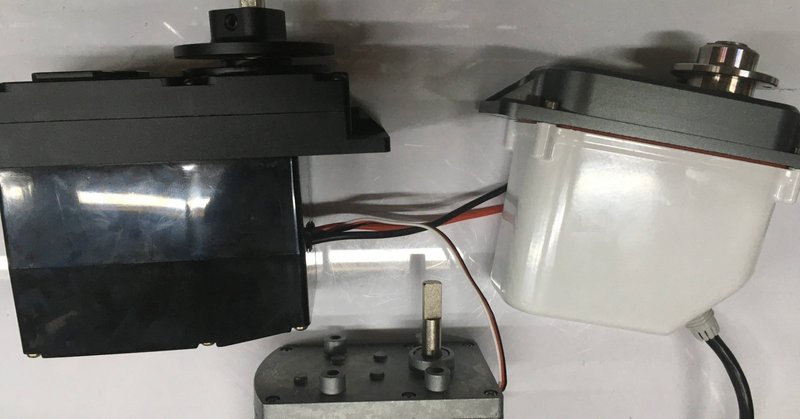
今回購入してテストしたサーボたちは以下の3つです。サーボ1個で約1万円、テスト装置やギア減速の追加を試したので約2万円程度かかっています。この記事を書くために使った費用は約5万円と言えます。
購入したサーボ紹介
1個目のJMTというメーカー(?)の400kgf.cm出るというサーボ(以下JMT400)が唯一使えそうでした。このJMT400については後で詳しく述べます。
下の2つも購入しましたが、下の2つは出力軸がDカット軸にイモネジ固定なのが大きい問題でした。まず全然ダメだった下の2つから説明します。
3つのうち下の2つが論外だった理由
真ん中の基板とモーターむき出しの物は、出力軸がDカットな上に、サーボホーンが付属していないので負荷テストしていません。一番下の黒いSUPER500にはサーボホーン(イモネジ固定)が付属していたので、付属のサーボホーンを使って負荷テストを行いました。

負荷テストの結果、500kgf.cm相当の負荷をかける前に出力軸のDカットとイモネジの固定部か耐え切れず、軸をイモネジが旋削加工してしまい、回転は伝わらない上にサーボホーンが取り外せなくなってしまいました。
サーボホーンに付属していたイモネジは先端が平面なイモネジだったのでトルクに耐えられる物が選定されているのかも?と思ってそのまま試しましたが、案の定500kgf.cmのトルクはDカットの出力軸では耐えられませんでした。いったい何を根拠に500kgf.cmをうたっているのでしょうか・・・?
可能性としては、出力軸の固定にDカットイモネジ方式を使わないで、D型の穴が開いたサーボホーンを作って圧入するか、強力なカップリングで摩擦締結するという方法があるかもしれませんが・・・調べた限りこの軸径のカップリングで500kgf.cmのトルクを伝達できる物は無さそうです。

分解したときの内部写真
負荷テストの前に、3種類のサーボを分解しました。

分解前

分解中
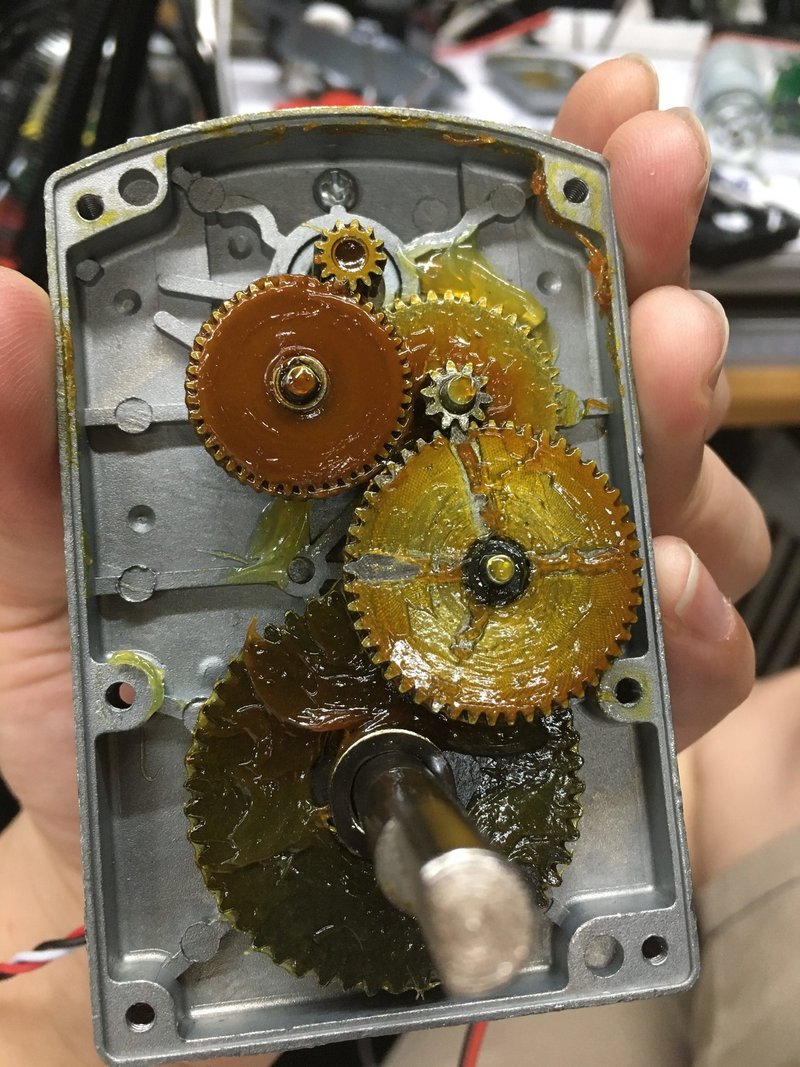
JMT400の分解写真
スペック
ブランド: jmt
電圧: 12v-24v (推奨バッテリー電源、カスタマイズすることができ高電圧が必要です)
速度 (無負荷): 12v約0.74s/60 ° 24v約0.37s/60 °
最大トルク:400kg.cm
定格トルク:140kg.cm
無負荷電流: <0.1A
ストール電流: 12v: <7A 24v: <14A
入力信号: pwm: 800us〜2200us、50-400hz
動作角度範囲:調整可能な: 最小 ± 30 ° 、最大 ± 150 °
重量: 766グラム
長さ、幅と高さ: 132*55*116ミリメートル
アプリケーション: 産業用ロボットアーム

ファイナルギアのおしりにマグネットがついており、写真で見える基板の上にマグネットエンコーダと思われる物が乗っています。機械式のポテンショメータは使っていません。モータードライバ基板は3つとも似たような基板が使われており、似たような規格(?)のモータードライバが流通していると考えられます。
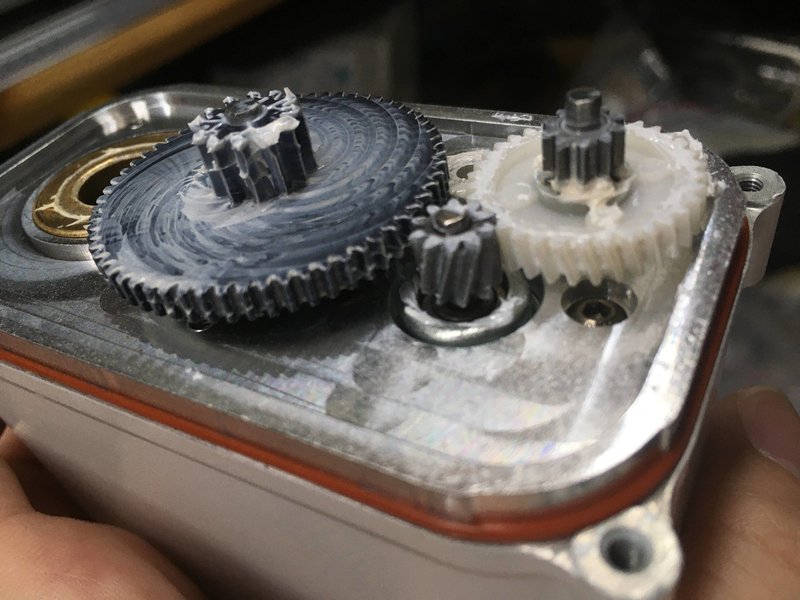
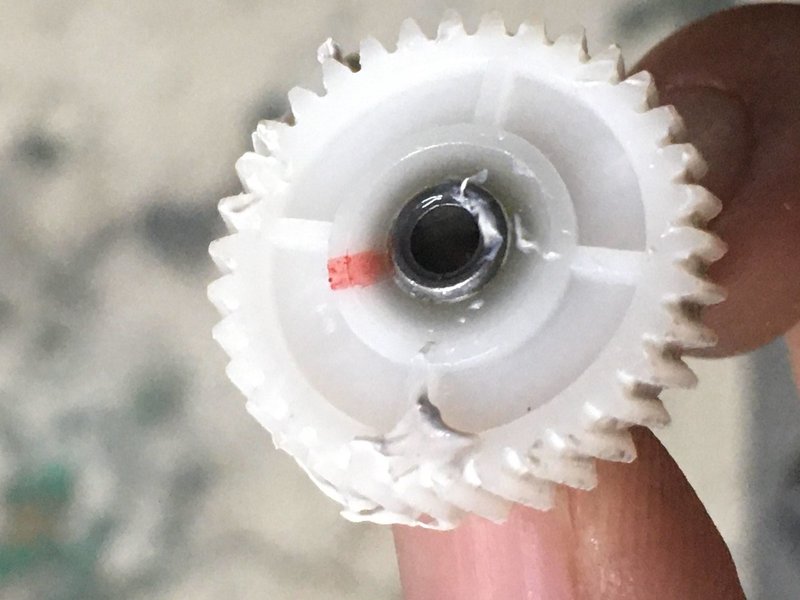
ピニオンギアと次のギアがはすば歯車(歯が斜めなのが分かると思います)になっています。伝達可能なトルクを大きくするためか?(理由不明)ピニオンギアの相手だけ樹脂製(白MCナイロンかPOM?)になっています。

ケースは一応防水性を考えてあるようで、ケースの接合部にはOリングが入っていて、ケーブルの出口には防水ケーブルグランドのような物がついています。厳密な防水性のテストはしていないが、少なくとも水滴がついた程度なら大丈夫そう。水没すると壊れそう。
今回試した3つのうち、このJMT400だけが防水性を考えてあった。理由はたぶん、コピー元の利根川精工のサーボが防水構造になっていて、それをそのままコピーしたからな気がします。

JMT400が他の2つと一番違うところがこの出力軸の構造で、他の2つとは違ってマシンキーによって出力軸とサーボホーンが回り止めされています。
これによって(少なくとも出力軸については)トルクを伝達できていました。ただし問題もあり、後で述べますが軸のキー溝が大きいようでバックラッシが大きいです。
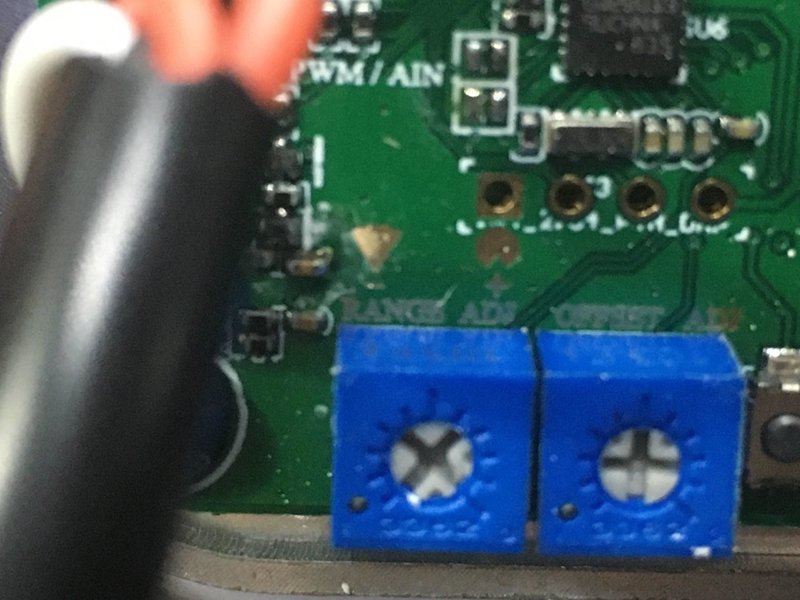
基板には2つの半固定抵抗がついています。左の物はRANGE ADJ で可動範囲を選びます。最小にすると±30度、最大にすると±150度の可動範囲になるとされていますが、実測したところ最大にしても270度(±135度)程度でした。半固定抵抗のアナログ値をそのまま使っているようで、部品の個体差によってある程度の幅があると考えます。右の物はOFFSET ADJで、可動範囲の中心の位置(ホームポジション)のオフセットを設定します。最大可動範囲は左のRANGE ADJで決まっていて、その範囲の中でオフセットをかけるので、オフセットをかけるほどに動作可能な範囲が狭まります。
このOFFSET ADJについては、最初は制御パラメータの不感帯か何かを設定する物かと思っていて、試してみてホームポジションのオフセットだと分かってガッカリしました。
残り2つの分解写真
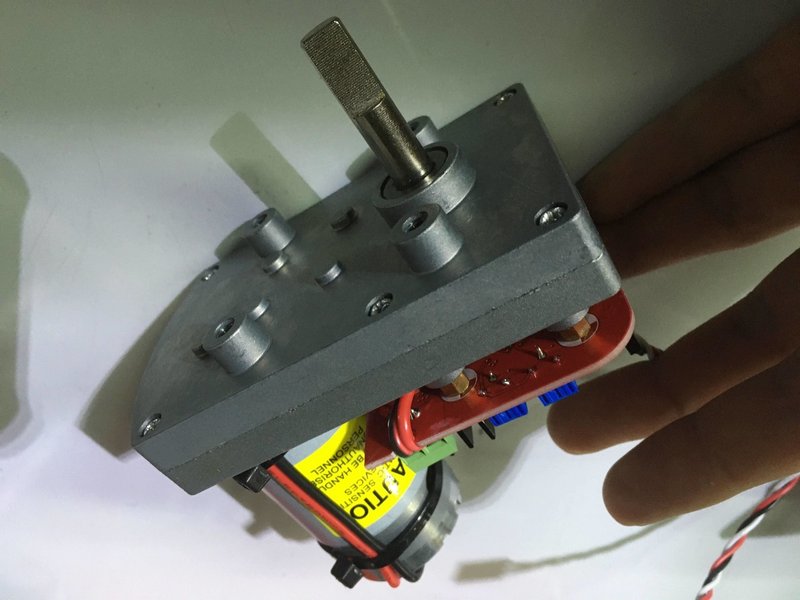
全段金属ギアで出力軸がDカット

入力はPWMとアナログ電圧を選択可能らしいが、試していない

エンコーダはマグネット

出力軸Dカット。この後に負荷テストでイモネジでゴリゴリされて分解できなくなった。
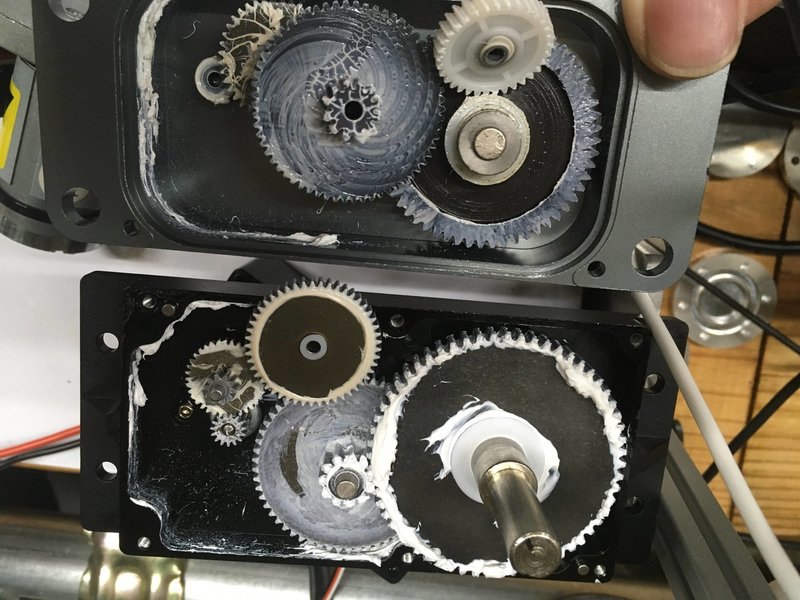
JMT400(写真上側)との比較。ファイナルギアの厚さはJMT400よりも厚く、全段金属ギアなので耐久力が高そうに見えましたたが、出力軸がDカットのため出力軸から先にトルクを伝えられないのであまり意味が無かったです。
JMT400の負荷テスト

上の写真のように、JMT400のサーボホーンに1mの長さの腕をつけ、腕が体重計を押す力を測定する事によりトルクを測定しました。供給電圧は12Vで行った。
例:体重計の数値が1kgのとき 1kg x 100cm = 100kgf.cm
負荷テストをした結果、数秒なら380kgf.cmのトルクが出せ、その後は数分程度連続で300kgf.cmのトルクが出せる事が分かりました。最大トルクは公証の400kgf.cmにわずかに及ばず380kgf.cmでしたたが、定格トルク140kgf.cmに対して最大連続トルクが300kgf.cmと健闘していました。
負荷テストの結果、連続で300kgf.cmのトルクが出せる事が分かりましたが、500kgf.cmのトルクが欲しかったので、これを満たすためには同じサーボを2つ並列で使うか、1つのサーボを2倍程度に減速して使うかの2つの手段が考えられました。欲しい可動範囲は120度程度だったため、300度の可動範囲を2.5:1に減速して必要トルクを満たそうと考え、サーボホーンの代わりに小平歯車をつけ、大平歯車とかみ合わせて2.5:1の減速をする事としました。



ギア減速を追加して、同様に負荷テストを行ったところ、2つ問題が発覚した。
1つ目の問題
モーターから出力軸までの間のどこかで力が伝わっていないらしく、出力軸がロックしていてもモーターの軸が回り続ける現象が起きるようになった事です。どこかの結合部が滑ってしまっているらしく、本来出るはずだった750kgf.cmのトルクは出ず、最大で550kgf.cm程度しかトルクが出なかった。
原因を調査するため分解、組みなおしを何度が行いましたが、原因はよくわからず。少なくとも追加した減速ギアが無くても再発したので、追加減速ギアが原因ではない事は分かりました。


ギアや軸などに破損は見られなかった。
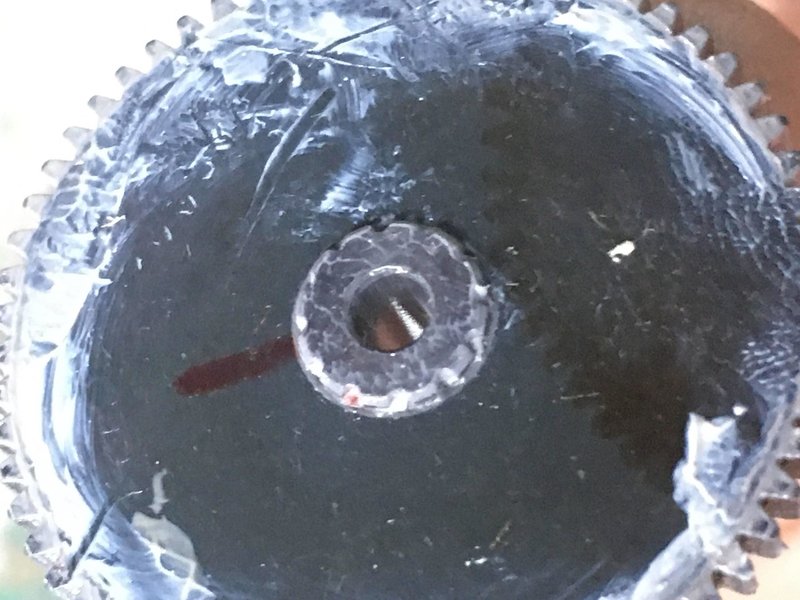
ピニオンとかみ合う樹脂ギアと軸の間が滑っているのではないかと予想しています。
2つ目の問題
1mの腕をサーボホーンに取り付けて負荷テストをしていました。バックラッシがどの程度あるか、1mの腕の先を手で押したり引いたりしたところ、かなりのバックラッシュがあると感じました。測定したところ1.5度から2度程度のバックラッシュがありました。
サーボケースを分解してバックラッシュの原因を探ってみたところ、主な要因は出力軸のキー溝がキーに対して大きすぎる事がバックラッシュの半分程度を占めているようでした。
マシンキーの寸法を測定したところJIS規格の範囲に収まっている事から、出力軸のキー溝が大きすぎるのが原因と分かりました。仮にキーが小さかった場合は適切な大きさのキーを買うか作るかしたらバックラッシュが減らせると思っていましたが、軸のキー溝が大きい場合はギアごと作り直す必要があるので現実的ではありません。(試していませんが、今思うと軸のキー溝とキーの間にシムを挟むという対策は可能かも?
3つ目の問題
これは負荷試験をする前からの懸念点で、制御入力がPWMしか無く細かい制御が不可能、稼働範囲の変更が半固定抵抗によるアナログ電圧で、電子部品の個体差によって制御特性に大きいバラつきがありそう、というモータードライバの問題がありました。
まとめ
今回購入した中では、JMT400だけは用途によっては使えそうな気がします。
(最大トルク300kgf.cm程度までしか使わない、PWMでコントロールする、サーボの個体差があっても良いという条件なら)
トルクが足りない、バックラッシが大きい、制御系に不安があるという3つの理由から、残念ながら1m級の人型ロボットの脚部のアクチュエータとしては使えないという結論になりました。
使えないという事が分かったのは収穫でした。また、同クラスの既存のロボット用のアクチュエータは今回購入した物の10倍以上の価格ですが、高価な価格にはそれなりの理由があるという事を改めて感じました。
サポートしていたけたらスーパーロボット開発資金として有効活用致します。 人が乗って歩いて変形して空を飛んで合体するようなスーパーロボットの実現が少し近づきます。