『自在化身体論』は「自動化」と「自在化」

稲見昌彦教授らによる『自在化身体論』.稲見教授と言えば透明なマテリアル「光学迷彩」の研究で有名だが、この本の中では人間の拡張可能性について興味深い話をしている.
この本の中で取り上げられている「自動化」と「自在化」と言う考え方.最近注目を集めている完全自動運転やルンバといった掃除機は「自動化」に当てはまる.そして自在化と言うのは人間の身体性の限界を超越したアプローチを取ることだと思う.
例えば両手を使っていて手が離せない時に水が飲みたいという欲求は現実的には不可能だ.なぜならば人間には2本しか腕がない.しかし3本目の腕があれば水は飲めるように今までの人間の身体の限界を超越したことになる.
他にもマニュアル車の運転はある程度の経験が必要になるためオートマドライバーにとっては大きな壁になる.そこにキカイ的なアプローチを取ることによってマニュアル車をサポートしながら運転に対する価値を高めることができるのではないかという試みがある.運転における無意識的な潜在的行動と意識的な行動をキカイが検知、調整しサポートを行なっていくというものだ.
この潜在的行動をいうのは人間が従来経験などによって持つ行動のことで、歩く行為は意識的な行動ではないため潜在的な記憶による行動と判断することができる.この潜在的な運転行為と意識的な運転行為の間に存在する価値が人間の得られるもので意識的な運転行為をキカイがサポートし人間は恩恵を得られながら運転という喜びを享受できるよになる.
我々の思い描く未来の姿にディズニーの『WALL・E(ウォーリー)』の世界の人間を想像する人は少なくないはずだ.実際に僕も怠惰な人間を未来社会に思い描いてしまっていた.(ウォーリーはぜひ見てほしい)
しかしその世の中で人間が生きる目標を見つけてエネルギーを放出するのは難しいことだ.だからテクノフォビアといった技術に対する悲観的な目が近年増えているのではないかと思う.
この自在化身体論で思い描かれる社会は「人間=キカイ」における対等な関係である.
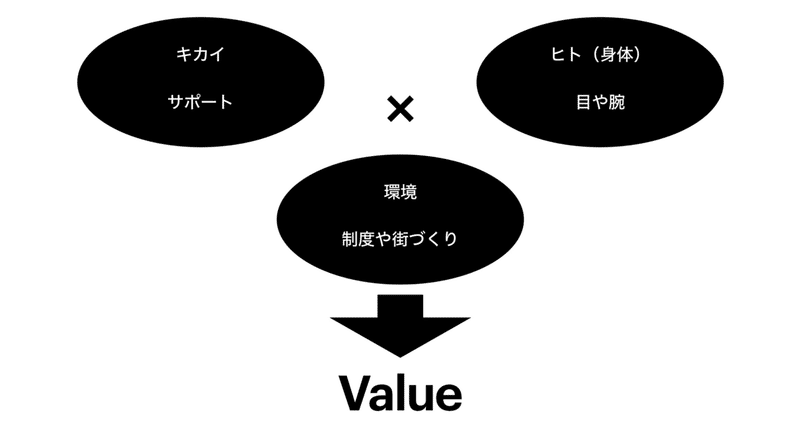
例えば介護ロボットでは人間のフィジカルを支える注目技術になるが、介護ロボットが全ての行動の支援は行ってはいけない.介護ロボットはあくまでも介護であり、目的は要介護者の生活のサステナビリティであり行動の拡張である.
行動を拡張するために要介護者に適度なパワースーツを着用させ筋肉を働かせることは身体性のサポートとして人間とキカイの融合体である.
目指す社会は「自動化」ではなく「自在化」であり、身体を伴う行動にキカイが拡張アプローチを取ることで今までには不可能だった価値を作り出すことができる.
この「自在化」の認識は僕の1番の気づきだった.是非この本を読んで「身体」と「自己」「キカイ」などの関係に着目してほしいと思う.
この記事が気に入ったらサポートをしてみませんか?