
手ぶれ補正ユニットの解説

引き続き、レーザー顕微鏡の試料走査ステージに利用している、デジカメの手ぶれ補正ユニットの解説をする。
手ぶれ補正ユニットについて
Sony DSLR-A230 に使われているものが、Aliexpressで購入できる。初めに購入した時は¥3,000ぐらいだったが、今は円安のためか、¥4,500ぐらいに値上がりしている。
主な構成としては、以下の2つ。
ステージを移動させるための2つの超音波アクチュエータ
ステージ位置を検出するための、2軸ホール素子HQ8220と磁石

フレキの端子がついており、16極0.5mmピッチのFFCコネクタで接続できる。このピン配置は有料記事として載せておいたので、もし興味がある方は購入を。超音波アクチュエータの配線は太いのでわかりやすいが、HQ8220は実装近辺のパターンを理解しておく必要がある。

超音波アクチュエータ
超音波アクチュエータの開発に動作方法の概要が載っている。
このデバイスは、駆動波形に合わせて駆動部摩擦部材と呼ばれる部分が軸方向に伸び縮みするようになっている。この部材に取り付けられた可動部分(試料台として利用するところ)が一緒に動いたり、滑ったりする。軸をゆっくり伸ばしているときは可動部分は追従し、逆の動きを急にすると可動部分の位置はそのまま、テーブルクロス引きのように摩擦部材だけずれる。
摩擦部材を動かすために圧電素子が使われている。圧電素子は、電圧をかけると伸び縮みしたり、力を加えると電圧出力をしたりする特殊な材料だ。有名どころだと、真鍮の板に乗った圧電ブザー、ライターの火おこし、超音波エコー検査のプローブなどに利用されている。
駆動するには、2つの矩形波をもとにHブリッジ回路で階段状の波形を作り、入力すればいいようだ。矩形波をRaspi picoのpio機能で、Hブリッジ回路としてTC78H653FTGで行うことにした。階段波形の振幅は±5V程度で問題なく動いた。
パルス数が合計で同じでも、何度か止めながら移動する場合より、止めずに移動した場合の方が、移動距離が長い。おそらく、静止摩擦/動摩擦とステージの慣性から決まると思う。
駆動していない状態ではステージは固定される。周波数をステージが動かない程度に下げて駆動すると、ステージを手で動かすことができる。これでフリー/ホールドが実現できる。
フリーとホールドの実装#超音波モーター#手ぶれ補正#OpenLaserScanningMicroscope pic.twitter.com/Xfvs7pEThV
— nandemo_yasan (@naan_moo) October 16, 2023
HQ8220
AKM製 マルチチップホールセンサ。4つのホール素子が含まれていて、磁石の2軸の位置検出ができる。チップ周辺に1kΩの抵抗が一緒に実装されている。ちょっと前まではAKMのサイトからデータシートをダウンロードできたような気がするが、今は見つからない。どうやらディスコンになったようだ。
ホール素子の使い方に注意事項が書いてある。温度が上がるほど抵抗が下がるので焼損しやすく、電源電圧が高い場合は電流制限用の抵抗を入れた方が良いそう。今回はRaspi Picoの3.3Vを使うので、特にこの対応を取る必要はないようだ。
磁石の磁界を検出するので、そのままではもちろん位置に比例した出力にはならない(どなたか補正方法知りません・・・?)。仕方ないので基準位置だけをこの出力で記録して、必要に応じてP制御で戻す。
走査能力
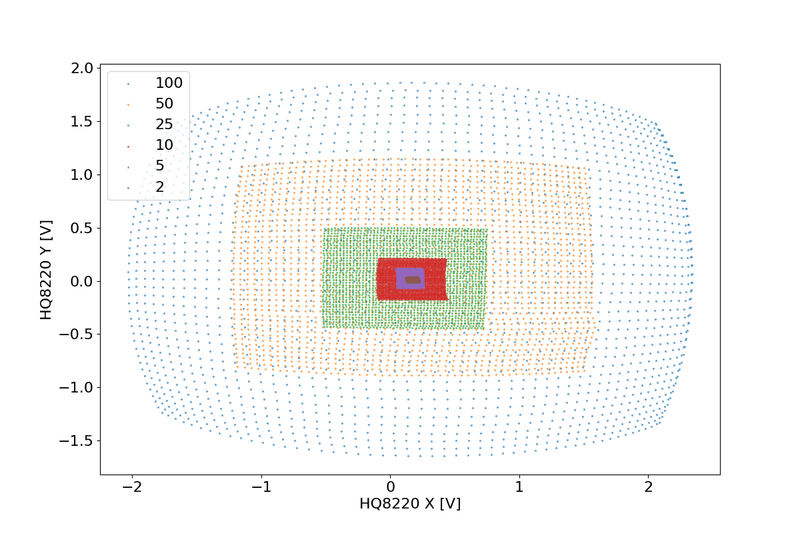
あるパルス数分の移動を1刻みとして、X50回 / Y40回を走査した時の各ポイントのHQ8220出力をグラフにした。駆動パルス数100回がほぼステージ可動範囲全体に渡る移動(X4mm, Y3mmほど)になる。パルス数が大きいほど移動範囲が大きいことが確認できる。
パルス数5ぐらいまではなんとか格子状のパターンが見えるが、2まで小さくするとパターンはぐちゃぐちゃになってしまう。
パルス数5が実用的に最も少ない移動が可能として、
位置の最小刻みを超大雑把に計算すると、
x方向の可動範囲が4mmで出力範囲が-2~2V
パルス数5のX出力範囲は0.05~0.25V なので、移動距離0.2mm
これを50分割 = 4umぐらい
となり、手軽にやってもこれくらいの能力がある。出力補正などをしてきちんと位置制御ができるようになると、もう少し改善するかもしれない。

フレキ端子のピン配置
1つのユニットを壊してピン配置を調べたので、以下はコーヒー一杯分ぐらいおごってくださる方へ。
ここから先は
¥ 500
この記事が気に入ったらサポートをしてみませんか?