ROSコミュニティで存在感を増す NVIDIA

最近 NVIDIA がオープンソース プロジェクト ROS のコミュニティで存在感を増しています。昨年(2022年) 10月に京都で開催された ROS の年次イベント ROSCon 2022 において NVIDIA は Isaac ROS の最新版である Developer Preview 2 (DP2) を発表しました。ROS2 向けの機能が拡張されているのに加え、特に注目しているのは AMR (自立走行搬送ロボット) 向けのリリースが含まれている点で、ロボットのタスク管理やモニタリング機能を提供するフリート管理機能が拡張されています。
NVIDIA Isaac は NVIDIA GPU を搭載したロボットを開発するためのツール、ライブラリ、API のセットで、ロボット制御とシミュレーションのための Isaac Robotics Engine と、コンピュータビジョン、ロボット工学、AI用のソフトウェア ライブラリやツールが提供されています。
Isaac ではシミュレーション環境の Isaac SIM やハードウェア アクセラレーション環境の Isaac ROS GEMS などが提供されています。

また NVIDIA は 2021年9月に Open Robotics (旧 Open Source Robotics Foundation) と ROS開発者コミュニティに一連の認識技術を提供する最新の取り組みを発表していて、NVIDIAの「Jetsonエッジ AIプラットフォーム」及び GPUベース システム上での「ROS2のパフォーマンス高速化」、ならびにOpen Roboticsの「Ignition Gazebo」と「NVIDIA Isaac Sim on Omniverse」とのシームレスなシミュレーション相互運用の実現に向けて合意しています。
Isaac ROS は 2021年に発表された自律動作ロボットに欠かせない AIや画像処理、ナビゲーションのためのハードウェア アクセラレーション機能などを ROS 2向けに提供するものです。
フリート管理機能の ROS2向け拡張は、ロボットのフリート管理向けに設計されたオープン スタンダード VDA5050 がベースになっていて、メッセージは IoT で利用されている MQTT が使われています。
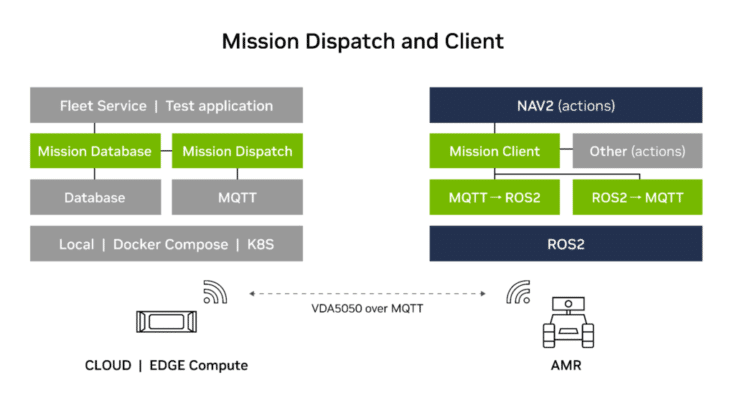
Mission Dispatch はコンテナ化されたマイクロサービスで、NVIDIA の開発者向けポータル NVIDIA NGC から入手することが可能なのに加え、GitHub の Isaac を利用してフリート管理システムに取り込むことも可能です。
Mission Client は ROS2 Humble が対象となっており、GitHub の Isaac ROS から入手することが可能なのに加え、ナビゲーション スタック Nav2 に組み込むことも可能です。
NVIDIAは昨年 3月に開催された GTC 2022 において AMR を開発するためのプラットフォーム「Isaac Nova Orin」も発表しています。
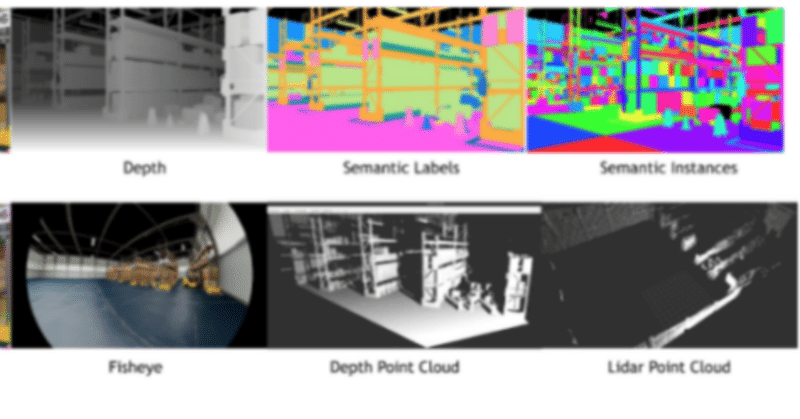
Isaac Nova Orin は AMR の自律性を設計、構築、テストするために必要なすべてのコンピューティングに加え、Jetson AGX Orin 2基や最大 6台のカメラ、3台のLiDAR、8台の超音波センサーで構成されるセンサースイートを含むセンサーハードウェアが含まれています。さらに Isaac Sim on Omniverseでロボットをシミュレートするために必要なツールや、認識及びナビゲーション タスクを高速化するように設計された多数の ROSソフトウェア モジュールのサポートも含まれています。

今年も NVIDIA の ROS 及び AMR 関連の動きから目が離せません。
この記事が気に入ったらサポートをしてみませんか?