私の作るスポーツロボット
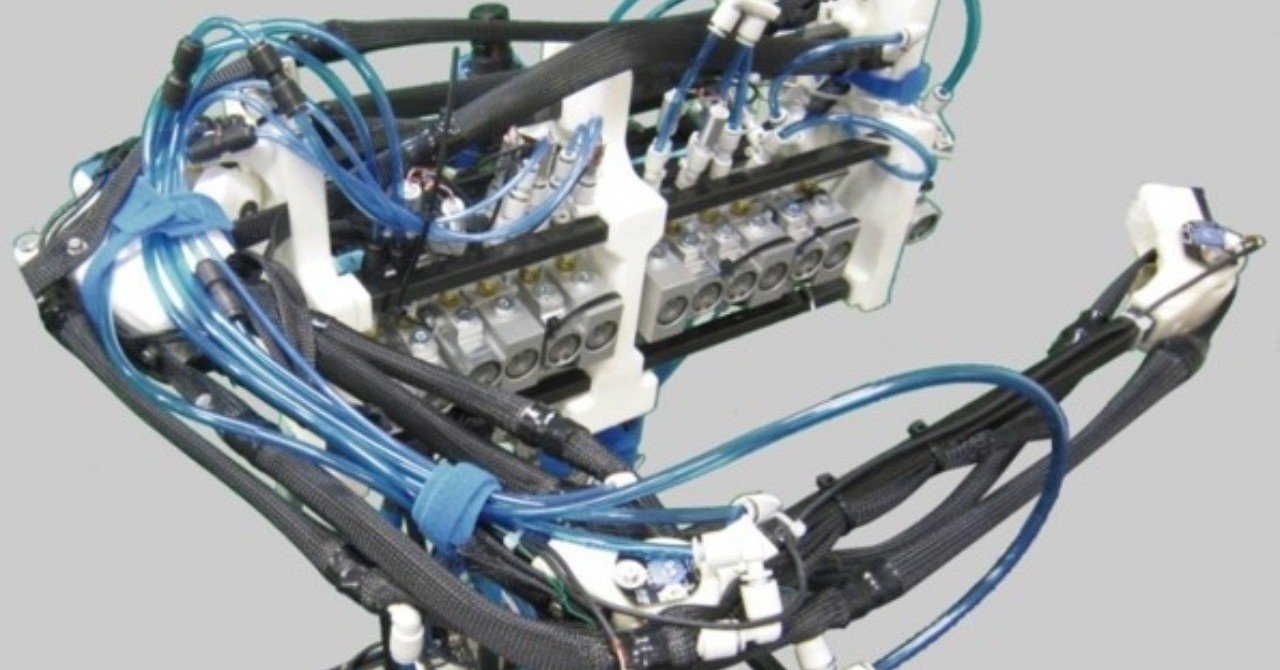
柔軟ロボットによる部品組立研究を紹介した記事でも書いたように、ディアボロ(ジャグリング)ロボットの研究をしています。研究を進めていくなかで、ジャグリングするロボットはスポーツするロボットと似た部分が多いことに気づきました。運動技能の優れるロボットのうち、スポーツロボットはどういう位置づけにあるのか、スポーツロボットの中で、私が作るロボットはどういう種類になるのかを整理しました。
ジャグリングロボットジャグリングは、ロボットの優れた運動性能を示すデモンストレーションとして、古