「リアルハプティクスによる手術支援ロボットの未来「医療に、やさしいチカラを」」レポート:健康未来EXPO 2019から学んだこと その06

詳細は「リアルハプティクス.pdf」を参照。
2019年04月05日、私は一般客として健康未来EXPO 2019(以下EXPO 2019)に参加し、ブース「リアルハプティクスによる手術支援ロボットの未来「医療に、やさしいチカラを」」(以下同ブース)を見学した(1,2)。
「ハプティクス(Haptics)」は、「利用者に力、振動、動きなどを与えることで皮膚感覚フィードバックを得る技術」と国際ハプティクス学会で定義されている。一般的には仮想モデルによって仮想的な力覚を実現する技術であると言える。
一方、「リアルハプティクス(Real-Haptics)」は「現実の物体や周辺環境との接触情報を双方向で伝送し、力触覚を再現する」技術である。
人間は物に触っただけで、それが鉄の様に硬いのか、スポンジの様に柔らかいのか、風船のように弾力があるのか、および/また、触っている物体が自立的に動いているのかなどを即座に感じ取ることができる。これは人間が生まれたときから備わっている当然の感覚である。しかし、この能力の備わっていない装置で物に接触すると、硬いのか柔らかいのか分からず、変形や破壊などを引き起こしてしまう。
リアルハプティクス技術は力触覚を装置に実装し、物のことを考慮した優しい動きや力触覚の長距離伝達を達成する全く新規の技術である。多様化の進む社会で自動化や機械化を実現するためには必要不可欠となる技術である。
ハプティクス研究センター(以下同センター)は、リアルハプティクス技術の実用化・展開、ならびに、持続的な成長を目的とし様々な研究を行っている(3)。
ハプティクス技術の原理は単純化すれば和差算で、数学的にはアダマール行列である。アダマール変換のロボット工学への適用は世界初の試みのようである。なお、和差算の和の部分が付け加わると、機械が急に柔らかくなる(図01,4)。
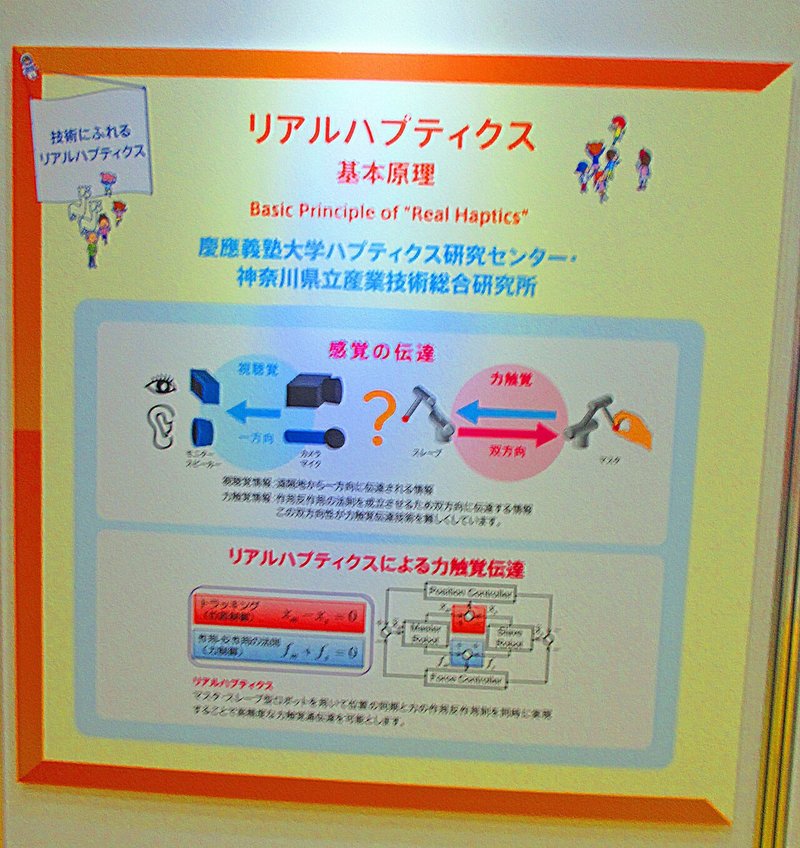
図01.リアルハプティクス 基本原理。
同センターは同ブースで、一体型ハプティクス鉗子、軟性内視鏡鉗子、および、力触覚通信ハンドを紹介した。
遠隔操作ロボットの構成方法の1つであるマスタ・スレーブ・システムは多くの手術支援ロボットに採用されている。腹腔鏡などの視覚系の技術と統合した手術支援システムであるda Vinci® (Intuitive Surgical社)は日本国内などで多くの病院で使用されている。しかし、現在普及している手術支援ロボットは力触覚を操作者に伝達する機能が無く、臓器や血管等に接触した感覚が得られない。また、手術支援ロボットは規模が大きく、導入・維持に費用がかかる。さらに、従来の手術器具とは操作方法が異なり、ロボットを使用して治療を行うためのトレーニングを要する。これらの問題が今後のロボット手術の普及の障害となる。
そこで、溝口貴弘(以下敬称略)と松永卓也は本研究で、マスタ・スレーブ一体型医療用デバイスの開発と力触覚技術の応用によってロボット手術の課題に取り組んだ。
従来のマスタ・スレーブ・システムでは操作者側のマスタ・ロボット(マスタ)と作業空間側のスレーブ・ロボット(スレーブ)を機械的に分離して遠隔操作を可能とする。一方、マスタ・スレーブ一体型医療用デバイスは1つの手術機器にマスタとスレーブを組み込むことで、手術支援ロボットと比較して導入における障害が少ない医療器具の形態をとりながらロボット技術による支援が可能となる。なお、マスタ・スレーブ・システムにおける力触覚伝達は、より安全で繊細なロボット手術の実現に貢献する重要な技術の1つである。
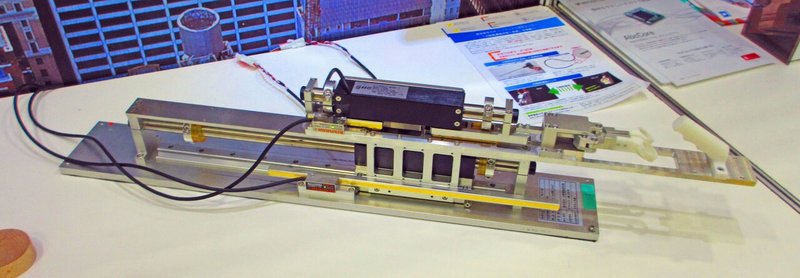
腹腔鏡外科手術では、トロッカを介して治療を行うために先端のグリッパと医師の手元のハンドルが細長いシースで接続され、内部のロッド等で動力伝達を行う鉗子が用いられる。一方、マスタ・スレーブ一体型鉗子は腹腔鏡手術用鉗子の把持自由度に力触覚機能を実装した医療用デバイスで、ハンドルを介してグリッパで把持した物体の固さを伝達する(図02)。
このマスタ・スレーブ一体型鉗子は装置に駆動部を備えるため、従来の腹腔鏡手術用鉗子と比較して大型であるが、片手で扱うことが可能な大きさである。また,エンドエフェクタは取り換えが可能である。
実験の結果から、ハンドルの操作に連動してグリッパが開閉したことが確認された。トルク応答では作用・反作用の法則が成立したことが確認された。そして、把持対象物の剛性の変化が認識可能であることが確認された。
従って、このマスタ・スレーブ一体型鉗子は従来の手術器具と同様の操作が可能で、かつ、力触覚による動作支援が可能な医療用デバイスであることが確認できた。
今後の課題として装置の小型軽量化に取り組む必要がある。マスタ・スレーブ一体型鉗子などの医療用デバイスは内部に駆動部を組み込むため、従来の器具と比較して質量が増加する。長時間の手術では術者の負担となるため,小型で高推力のモーターの使用や形状変更による軽量化が必要である。一方、その機能の面では、現在までに力触覚の増幅伝達や記録が可能であることを確認できた。今後は実用化に向けた臨床やオンラインでの剛性推定による動作支援等が課題となる(5)。

(a)全体。

(b)先端部。
図02.マスタ・スレーブ一体型ハプティック鉗子。
北川雄光教授(慶應義塾大学医学部外科学教室(一般・消化器))らは軟性内視鏡手術システム(Flexible Endoscopic Surgical System:FESS)の非臨床試作モデルを完成させた。
FESSは軟性の内視鏡カメラと鉗子などの処置具をしなやかなチューブ内に収め、かつ、この柔らかいチューブを体内に挿入し、患部で内視鏡や鉗子類を出して処置を行う。カメラと処置具はそれぞれ独立して動かすことができる。挿入する部分が柔らかいので、硬性内視鏡や既存のロボット支援手術では直線的に接近しにくい体の深い部分に曲がって届き、また、ロボット技術の支援により、マニュアルで行う腹腔鏡手術に比べて精密な操作が可能である。
硬性内視鏡手術ロボットの登場により手術の低侵襲・高精度化が進んだとはいえ、膵臓がんなど硬性内視鏡での手術が難しい疾患が多く、こうした疾患の治療に対しては依然として開腹手術が主流である。FESSにより、こうした疾患に対しても、内視鏡手術が可能となることが期待される(6)。
FESSの構成要素の1つである軟性内視鏡鉗子が展示された(図03)。

(a)全体。

(b)作業時の動画。
図03.軟性内視鏡鉗子。
同センターは力触覚通信ハンドを紹介した。力触覚通信ハンドはマスタとスレーブから成る。
リアルハプティクスの研究テーマの1つである遠隔操作において、マスタとスレーブの間を有線または無線で結んで通信させ、マスタで行っている動作をスレーブで再現する。通常の遠隔操作では、マスタの動作をそのまま遠隔側で再現させるだけである一方、リアルハプティクスの活用により手応えがマスタに伝わってくるので、スレーブに柔らかいものを掴ませる場合には力加減が調節できる。
マスタを操作することで、スレーブが相互に繋がっているかのように動作する。この時、マスタの操作者は輪に指を入れてスレーブの装置に付いている機械の指を動かすが、強く挟めば機械の指で押されているポテトチップが反発する力が伝わる。
なお、操作者の動作は全てデジタル・データとして記録できるので、記録されたデータを用いて操作者の行為を後から忠実に「再現」できる。また、リアルハプティクスによる動作には柔軟性があるため、ポテトチップを他のものに置き換えても力加減をしながら掴むことができる(図04)。
(a)マスタ。オペレータが操作する。

(b)スレーブ。ポテトチップを触った時の感覚をマスタに伝えることができる。
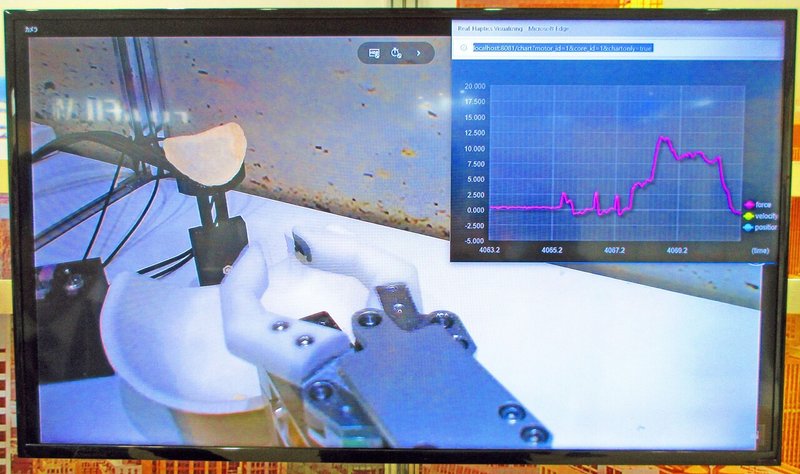
(c)スレーブと力触覚情報の可視化。力触覚情報がグラフとして可視化されている。
図04.力触覚通信ハンド。
リアルハプティクスの活用例として、従来の産業ロボットでは実現できない様々な用途が考えられている。例えば、大林組は、左官作業における手の動きと力、ならびに、力触覚を再現可能な建設技能作業再現システムを開発している。
同センターはネットワーク上の機械や人間、ならびに、操作内容を記述するコンテンツを連結・連携して機能させる世界を「IoA(Internet of Actions)」と呼び、力触覚に関わる様々なノウハウを共有して活用させたいと考えている(7)。
モーションリブ株式会社、同センター、および、国立大学法人 横浜国立大学はリアルハプティクスによる力触覚伝送機能を有する、非対面でポリメラーゼ連鎖反応(Polymerase Chain Reaction:PCR)検体採取を可能とする遠隔操作システムを開発し、医師と共に技術の基礎検証を行った。更に同システムを通して取得した動作データを利用することで、システムが自動で医療従事者の動作を行うことが可能であることを確認した。
医療従事者がこのシステムでロボットを遠隔操作して検体を採取するため、被検者と医療従事者が物理的に隔離された状態での検体採取が可能となり、医療従事者の感染リスクの低減が見込まれる(8)。
同センターにより同ブースから、私はマスタ・スレーブ技術の研究は予想以上に進んでいることを改めて思い知らされた。リアルハプティクス技術を使用する医療機器などの開発を大いに期待する。
参考文献
1 日本コンベンションサービス(JCS)株式会社.“4年に一度開催される「健康未来EXPO 2019」は、大盛況の中でフィナーレを迎えました”.JCS トップページ.ニュース.イベント&講演.2019年05月16日.https://www.convention.co.jp/news/detail/contents_type=15&id=541,(参照2021年05月18日).
2 学校法人 慶應義塾大学 ハプティクス研究センター.“健康未来EXPOにて《力触覚技術を搭載した医療応用》《力触覚通信ハンド》のブース展示を行います。(2019/3/30~4/7@ポートメッセ名古屋)”.ハプティクス研究センター ホームページ.ニュース・イベント.2019年03月14日.http://haptics-c.keio.ac.jp/assets/article/kenko-mirai-expo2019.pdf,(参照2021年05月18日).
3 学校法人 慶應義塾大学 ハプティクス研究センター.“ごあいさつ”.ハプティクス研究センター ホームページ.http://haptics-c.keio.ac.jp/,(参照2021年05月18日).
4 学校法人 慶應義塾大学.“触覚をもった柔らかいロボットが未来を拓く 理工学部システムデザイン工学科 大西公平教授”.慶應義塾大学 ホームページ.Keio Times(特集)一覧.Keio Times(特集).2016年09月16日.https://www.keio.ac.jp/ja/keio-times/features/2016/7/,(参照2021年05月18日).
5 地方独立行政法人 神奈川県立産業技術総合研究所.“力を感じる医療・福祉介護次世代ロボットプロジェクト”.神奈川県立産業技術総合研究所 ホームページ.初めての方へ.刊行物・発行物.研究報告.研究報告2020.https://www.kistec.jp/wp/wp-content/uploads/2020_annl_rprt_07_01.pdf,(参照2021年05月18日).
6 学校法人 慶應義塾大学.“軟性内視鏡とロボット技術を融合した手術支援システムを開発-より低侵襲な国産手術支援ロボットを産学連携で実現-”.慶應義塾大学 ホームページ.プレスリリース一覧.プレスリリース.2019年02月08日.https://www.keio.ac.jp/ja/press-releases/2019/2/8/28-50908/,(参照2021年05月18日).
7 株式会社 日経BP.“ロボットは卵をつぶさずに掴めるか? 力加減を触覚技術で数値化して制御”.未来コトハジメ ホームページ.ロボティクス社会.2021年03月30日.https://project.nikkeibp.co.jp/mirakoto/atcl/robotics/h_vol46/,(参照2021年05月18日).
8 学校法人 慶應義塾大学.“リアルハプティクスによる力触覚伝送を有する遠隔PCR検体採取システムの開発”.慶應義塾大学 新川崎タウンキャンパス 新川崎先端研究教育連携スクエア ホームページ.News Scrap.慶應義塾大学 ハプティクス研究センター 特設ページ.プレスリリース.2020年09月10日.https://www.keio.ac.jp/ja/press-releases/files/2020/9/10/200910-2.pdf,(参照2021年05月18日).
この記事が気に入ったらサポートをしてみませんか?