飛行経路作成フリーソフトQGroundControlの使い勝手

所感
UAV(ドローン)を使って測量をするにしても、点検をするにしても飛行経路の作成はどうしても必要になる。
しかし飛行経路作成ソフトはたくさんあり導入コストもなかなかのモノが多い。
導入するだけでも高コストな上に保守などのランニングコストもかかってくることが多いため、使用頻度と費用対効果を考える必要がある。
飛行する機会が少なく、コストを押さえようと思うとフリーソフトであるQGroundControlで作成することになると思うので使い勝手をメモ。
公式サイトからインストールできる。
手順
計測場所の選定および範囲設定
計測範囲は私の母校である沖縄県うるま市の具志川東中学校にすることにしました。
上空から校舎を見たこと無いけど。懐かしい。

座標や都道府県、建物名称で検索してその場所に飛べたら楽ですが、そういった機能は無し。
検索機能追加してほしいところ。
ファイル→Surveyからプラン作成
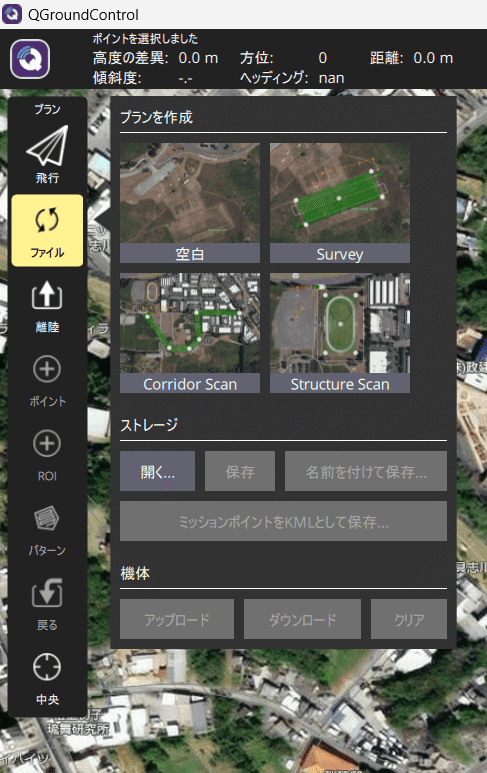
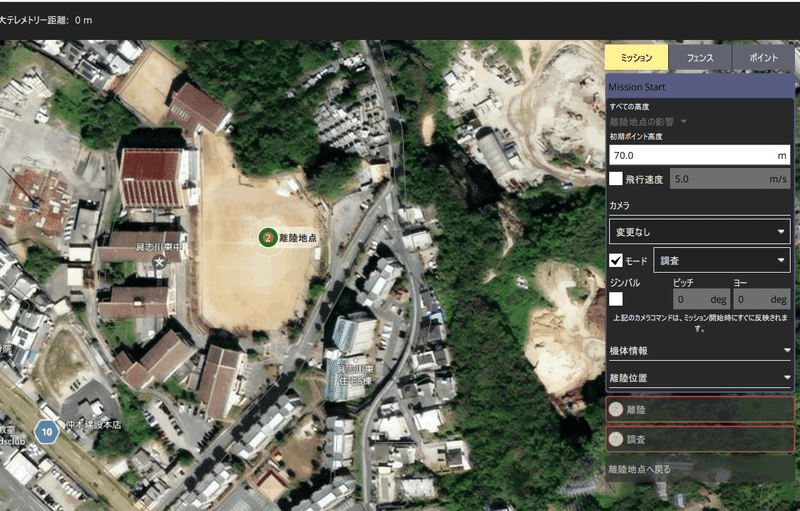
離発着場所を決めて範囲を設定する。
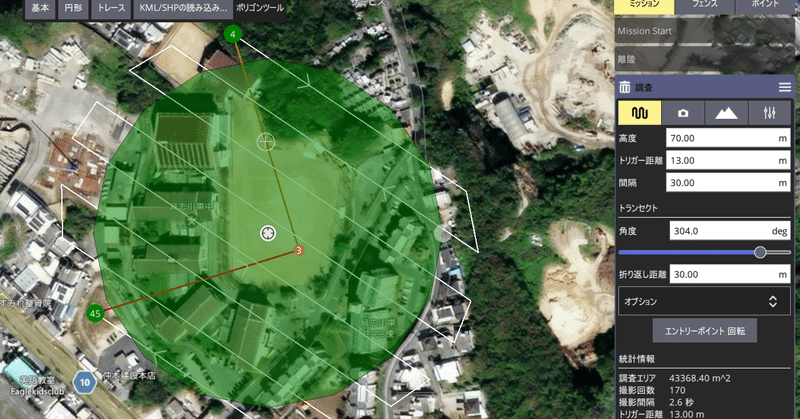
計測諸元の設定
「調査」タブからラップ率やコース間隔、対地高度やコース角度など細かく設定ができる。
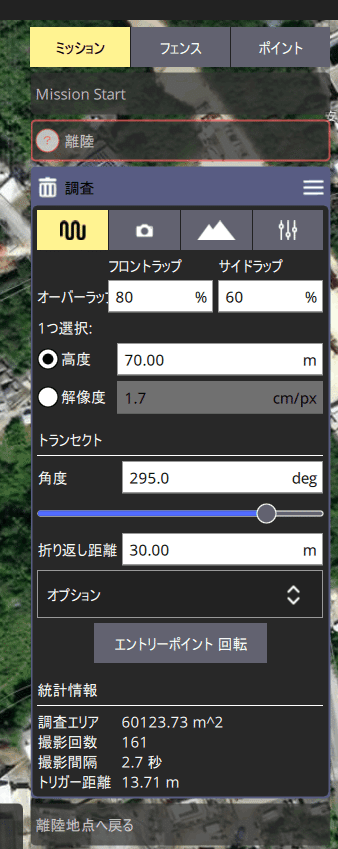
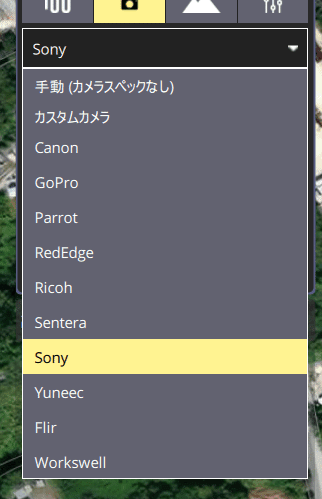
写真測量のための設定もあり、メーカーや機種によってラップ率など自動計算で経路作成をしてくれる。

地形追従機能もあるため、高度を地形に沿って飛行させるか、一定高度で飛行させるかの設定もできる。


KMLの読み込みも可能
事前に計測範囲などをKMLで作成している場合は、そのKMLを読み込んで経路を作成するということも可能。

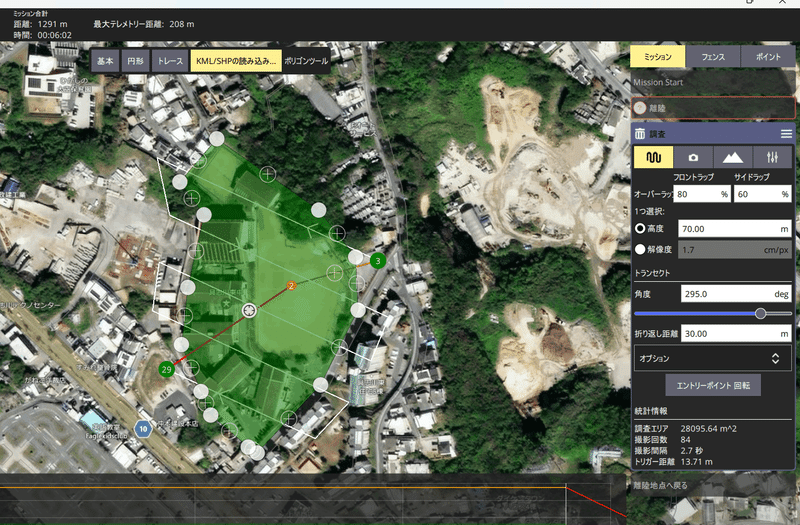
フリーソフトでこの機能は優秀。
顧客から計測範囲をKMLでいただければ欠測の心配も無い。
KML出力してLitchiに読み込む
作成したプランをKMLで保存してLitchiに読み込むとMatrice300やMatrice600、Inspire2などLitchi対応DJI機器で飛行させることができる。

CSVで出力できないのが不便。
KMLもしくはPLANファイルでの出力になる。
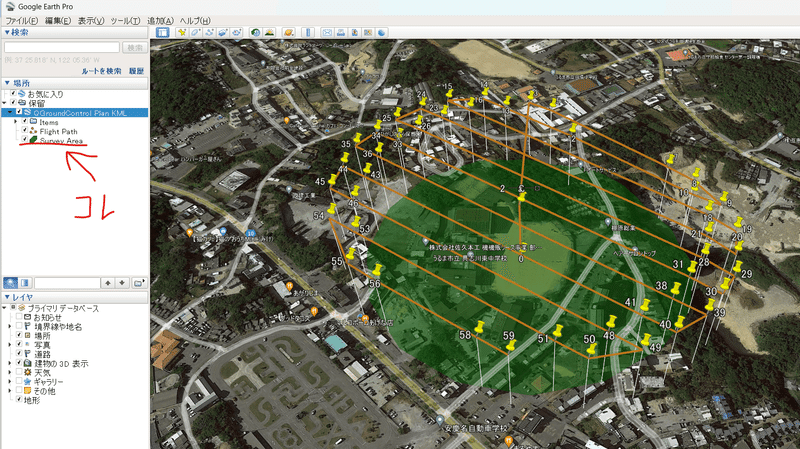
出力したKMLをそのままLitchiに読み込むと、なぜか計測範囲の部分もウェイポイントとして認識されてしまう。

一度Google EarthでKMLを開き、計測範囲部分のチェックを外してから上書き保存したKMLを読み込むとうまくいく。
結論
CADソフトではないので、複雑な地形で手動の経路作成がしたい時にはやや不自由ではあるが、通常の飛行であれば全く問題なく使えるクオリティ。
この記事が気に入ったらサポートをしてみませんか?