二足歩行スタックチャン(Walk chan)を作ってみた

この記事はスタックチャン(Stack-chan) Advent Calendar 2023 10日目の記事です。
(すっかり遅れてしまいすみません)
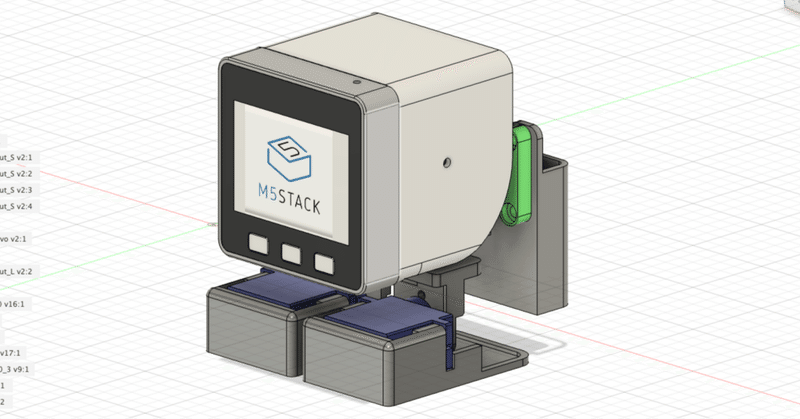
どこまでを「スタックチャン」と言っていいかというのはあるのですが、Ottoみたいな2足歩行ロボットをM5Stackで作ってみたくて作成しました。
2022年のスタックチャン誕生1周年の「誕生日会」あわせて設計したものです。
週末の誕生日会に間に合いますように…#スタックチャン pic.twitter.com/lIHUE5Hu9t
— tomorrow56𝕏 🧠� (@tomorrow56) July 20, 2022
誕生会にてお披露目したあと、リチウムイオン電池を搭載していることもあり展示会には持参しなかったのですが、MFTへの申し込みのときに細かい修正を入れてなんとかちゃんと動くようにしました。
久々に2足歩行を動かしたら、なぜかバランスが良くなっている🤔
— tomorrow56𝕏 🧠� (@tomorrow56) May 14, 2023
これも #スタックチャン ? pic.twitter.com/F7VHN7tYui
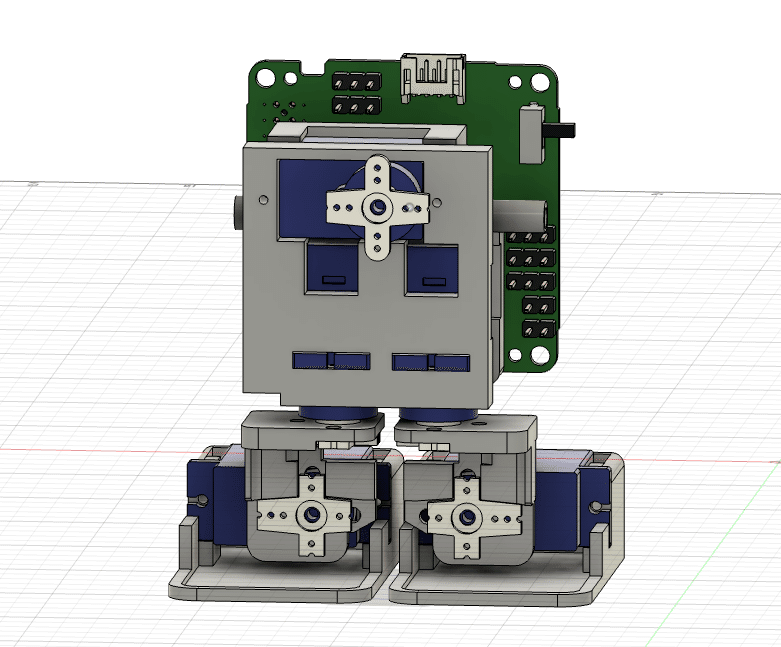
このタイプの2足歩行のポイントは、片足を上げた時に接地している脚の方にきちんと重心を移動することです。
M5Stack本体だけでは重心移動がうまくいかないために、背面に搭載したバッテリーを左右に動かす直動機構を設計しました。
背面はこんな感じで、サーボホーンにピニオンギヤを付けてスリットの入ったラックギヤを左右に動かします。ラックギヤは平行に並んだM3のビス2本で位置決めをして、バッテリーケースはラックギヤにビスで固定します。左右のビスの重さも重心移動に貢献しています。
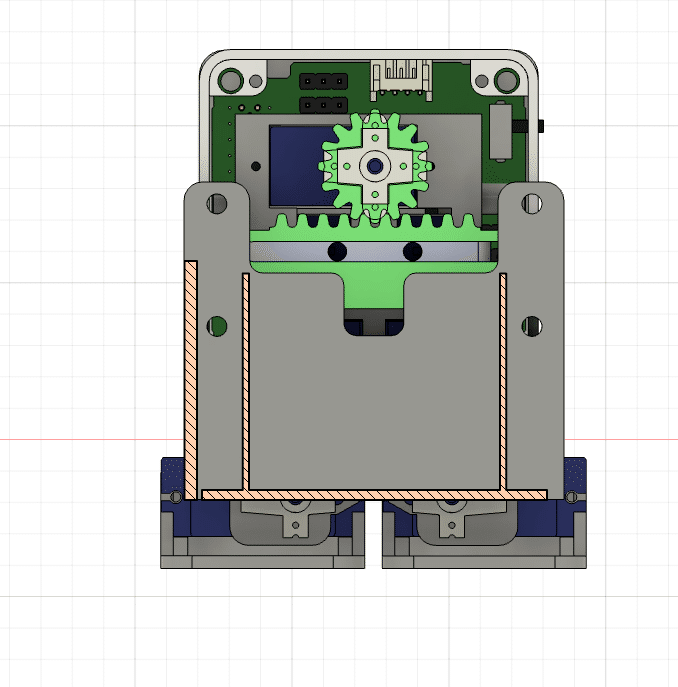
サーボはSG90計5個をスタックチャンのサイズにギチギチで詰め込みました。バッテリーの左右移動機構はブラケットにはめ込んで交換できるようにしました。
今はコンパクトデジカメのリチウムイオン電池を使っていますが、バッテリーケースを入れ替えることで単4乾電池への載せ替えも可能です。(ケースは今後設計予定)

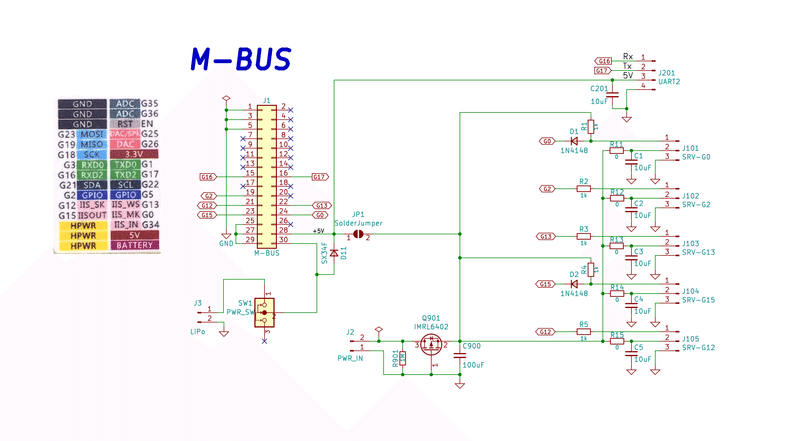
M5StackのM-BusからサーボPWMのコネクタに変換する基板は新規に設計しました。サーボ用の制御ICは使わずにM5Stackの信号で直接制御しています。上にはGrove互換コネクタを引き出せるようにしています。

サーボ用のコネクタはブラケットと干渉しない位置に配置しています。右下に2個ある2Pinのピンヘッダはそれぞれサーボ電源(5V)用とM5Stack用のリチウムイオン電池が接続できます。
サーボ電源はハンダジャンパでコネクタから取るかM-Busの5Vから取るかを選択できるようにしました。
また、横の物理スイッチでM5Stackの電源をON-OFFできるようになっています。
以下は完成したものが動いている動画です。右の動画がバッテリーケースの左右移動がよくわかると思います。
MFTにふらっと持っていこうと思ったけど、カメラのリチウムイオン電池を載せてるので諦めた2足歩行のやつ pic.twitter.com/JE1VYVnAHM
— tomorrow56𝕏 🧠� (@tomorrow56) October 16, 2023
ボディと基板の設計データとサンプルコードは以下のリポジトリにアップしてあります。
ボディは組立手順書の作成に挫折したので、アセンブリされた状態でのSTEP形式のファイルになっています。Fusion360等の3D CAD で自由に編集できますので、興味がある方はアクセスしてみてください。
皆様、スタックチャンと一緒によいクリスマスを過ごしてください!
よろしければサポートお願いします。分解のためのガジェット購入に使わせていただきます!