
車庫入れで気になるオーバーハング振出量や内輪差は「ピタゴラスの定理」に支配されている

家の前の道路幅は1台しか通行できない狭さででした。車庫幅が2台分あったため、セダンタイプの車をバックで駐車するときには余り気にしないで今まで駐車していました。
そのため数年間余り、駐車技術が向上していません。しかし隣にもう1台、車が追加される状態になりました。
駐車技術は直ぐには向上しませんが、取りあえず、バックで駐車する時に自分の車がどの程度、オーバーハングで振れるか、駐車場から出るときに注意する内輪差はどれくらいあるかなどを正確に知りたくなりました。
簡易的な計算式
簡易的に計算する式は、インターネットで色々調べてみると
(a) 内輪差=ホイルベース / 3
(b) 外輪差=ホイルベース / 4
(c) オーバーハング振出量(リア)
= (ホイルベース+リアオーバーハング) / 4 - 外輪差
= リアオーアーハング / 4+(ホイルベース / 4 - 外輪差)
= リアオーアーハング / 4
オーバーハング振出量(フロント)の簡単な計算式は見つけられませんでしたが、多分、運転中に確実に目視できるので必要ないのかもしれません。
因みに、リア、フロントそれぞれのオーバーハング長はメーカーでは公表していないので実測等で対応するしかありません。
これである程度の目安は出てくるのですが、狭い駐車場環境では少し物足りません。そこで今回は技術者ぽく、正確に計算してみたいと思います。
メーカーから公表されている数値を使って正確に理論計算をするにはあの有名な「ピタゴラスの定理」が必要になってきます。
ピタゴラスの定理
そうなんです、ピタゴラスの定理さえ理解すれば車の軌道が正確に求められそうです。簡単にこの定理を説明すると
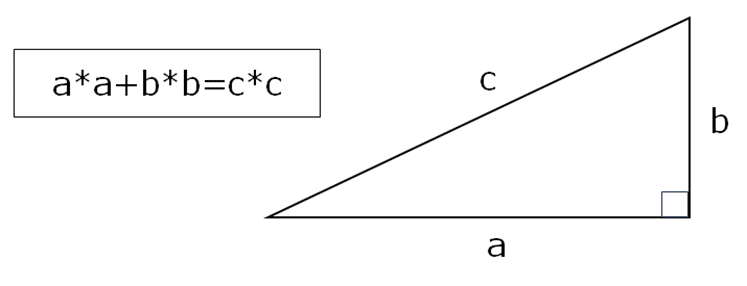
直角三角形なら上記の関係が成り立つと言うシンプルな定理です。
メーカーが公表している車の数値
車メーカーは色々な数値を公表していますが、足りない部分はこの「ピタゴラスの定理」等から求めることができます。主な数値としては
①全長
②全幅
③ホイルベース
④トレッド
⑤最小回転半径
それ以外にフロントオーバーハングの差、タイヤ幅などがあります。それを基に以下の図で⑥以下を計算で求めます。
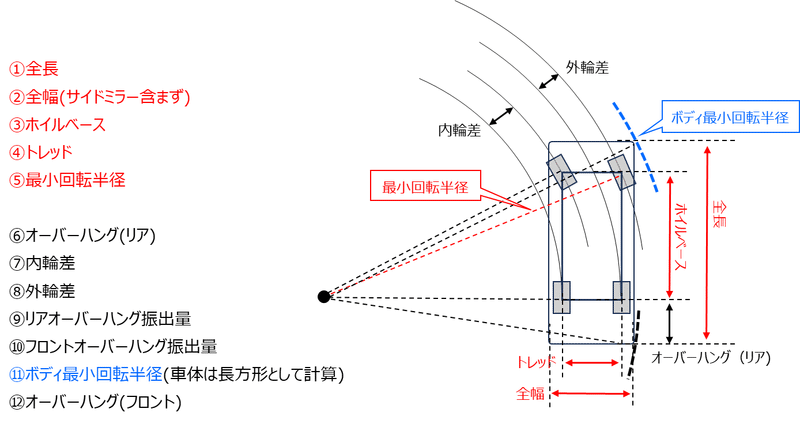
図をよく見ると円の中心から後輪までの直線と前輪と後輪の直線は直角になっています。つまり直角三角形が構成できることになり「ピタゴラスの定理」が利用できることになります。
例えば、外側の後輪の中心までの距離はピタゴラスの定理の関係から
(最小回転半径)×(最小回転半径) - (ホイルベース)×(ホイルベース)
で計算できます。図からわかるように、この計算結果と最小回転半径の差が外輪差となります。
実際の数値を使った理論計算式
赤字が入力数値でそれ以外はエクセルで自動計算させています。メーカーではフロント、リアのオーバーハング長は公表していないので目測等でフロントとリアの差を簡易的に入力しています。 差は意外と目測で測りやすいと思います(例えば、タイヤの端からバンパーまでの距離の比較して差を求める)。
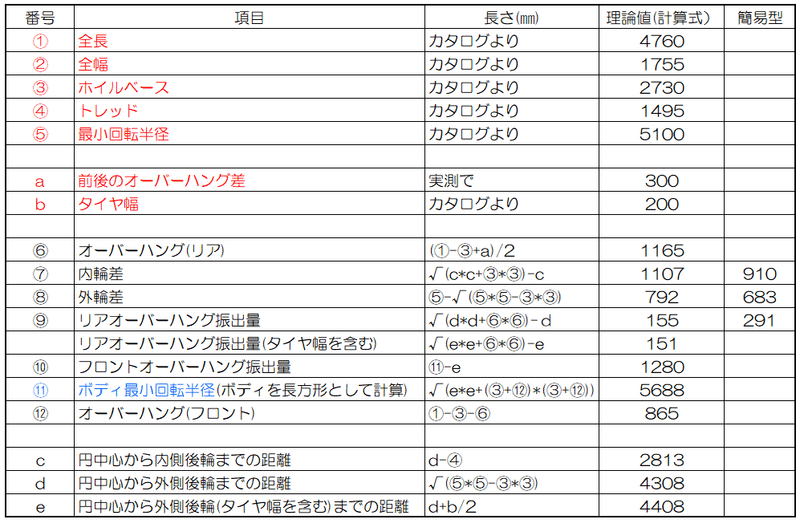
ここでは車体は長方形(角は直角)として計算していますが、実際の車体形状は少し丸くなったりしています。そのため、実際の車ではボディ最小回転半径が100㎜以上は少なくなってくると思います。
この計算では、「ボディ最小回転半径 - 最小回転半径 = 588㎜」となりますが、トヨタが出している参考値は殆んどが400m、アクアが少し大きくて500mmになっています。車体の丸み形状が計算値と実際の差異になると思います。
「フロントオーバーハング振出量」は1280mm、但し、車の形状を考慮すると車体から1100㎜程度、障害物から離れていればOKと言うことがわかります。また最大に振れるときは円中心と後輪の延長戦に車体のカドが来た時なので、その位置に障害物がなければもう少し余裕ができるかもしれません。
フロントオーバーハング振出量を計算するとき、正確にはタイヤ幅を含む必要があるので「リアオーバーハング振出量」ではタイヤ幅、有り無しで計算してみました。振出量はタイヤを含む方が若干、小さくなりますが、ほとんど誤差なので以後、タイヤ幅を省いた値の155㎜を使って問題ないと思います。
ネットなどで見ると普通車ならほとんどはリアのオーバーハングの振り出しはないように設計されているようです。それに、実際にはドアミラーがはみ出しているので、さらに余裕が出そうです。
ここで計算した振出量は停止状態でハンドルをフルに回した状態での計算なので、出庫時は内輪差を考えて徐々にハンドルを回すと思うのでリアオーバーハング振出量は考えなくても問題なさそうです。
実際とは少し違うかもしれませんが、理論上の数値がわかると安心感が出てきます。しかし、簡易的に計算する方法は結構、誤差が大きい感じがしました。トラックなどの大型車には向いているのかもしれませんが、普通車は参考程度に思った方がいいのかもしれませんね。
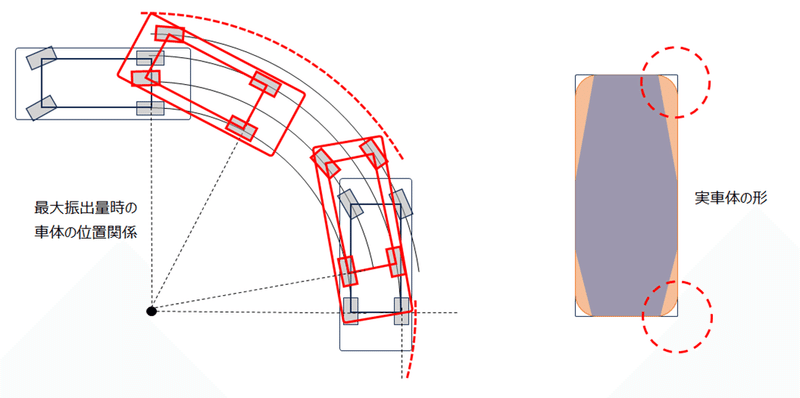
内輪差を考慮した曲がり方
直角に駐車場から出るときや道路を曲がる時の理想的な軌道を計算してみました。ここで想定した理想的な曲がり方とは下図のW1=W2(障害物の位置が中心から丁度45°になる曲がり方)となる車の動き方としました。
図からわかるようにW2を小さくするとW1は大きくなります。
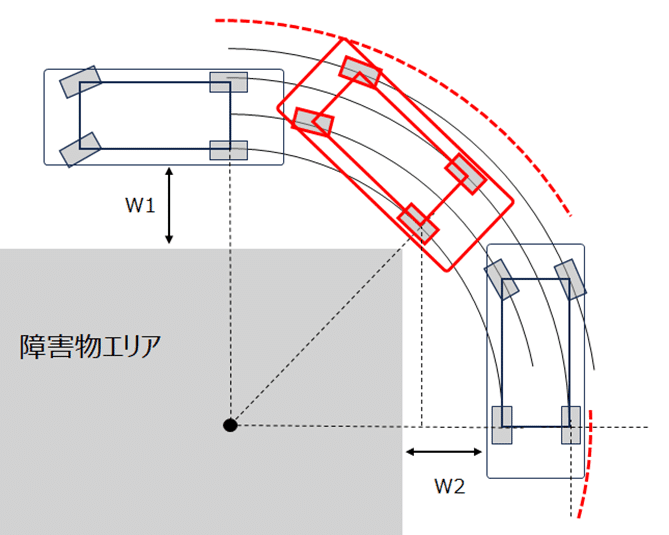
今までに計算した結果を使えば簡単に計算できます。図からわかるように円の中心から構成できる三角形が「直角二等辺三角形」になるので三辺の比率は「1:1:√2」になるので、後はピタゴラスの定理で計算ができます。

障害物の角から795mm離れて、後輪を2713㎜奥まった位置から車をスタートすればハンドルをフルに切って理想カーブで曲がることができそうです。
しかし、普段、外出時にメジャーとか携帯はしていないし、目測では誤差が大きくなります。私は身近のものとして靴を使って測っています。例えば25cmの靴なら外形はプラス2~3cm大きくなる感じです。795mmなら3足分で大体わかります。2713mmは大体ホイルベースの長さとほぼ一致します。
*************************************
上図では「f」が「③ホイルベース」より明らかに長くなっています。理由は③ホイルベースと④トレッドの関係が違うためです。
図の車体 ③ / ④ = 2.3程度(車体形状をいい加減に作画ため)
計算例 ③ / ④ = 2730 / 1495 =1.826
実際にはありえない細長い車体「③ / ④ = 2.3」になるようにトレッドの長さを1187㎜に変更して計算すると図のような関係(f>③)になります。
エクセルファイル
自分の車で自動的に計算したい人は以下のファイルをダウンロードしてください。
最後まで読んでいただいて有難うございます。 コメントは今後の参考に、フォローやサポートは今後の励みになります。