
自動導入とオートガイド

私の愛用する赤道儀は古いも古い、五藤光学のMark-Xです。
(今は五藤テレスコープなのかな?)
買ったのは二十数年前
その後、2軸モータードライブを追加で購入し、鏡筒もタカハシのミューロン180Cに載せ替えました。
そのMark-Xを自動導入とオートガイドができるようにした話です。
と言っても、馴染みの望遠鏡ショップに「出来ます?」とお願いし、天体自動導入装置 DOG NS-5000を手配していただき、使い方を教えてもらったわけで、私自身がいろいろ物づくりをしたというわけではないのですが。。。

写真がオートガイド中の様子です。
調整も何もしてないですが、アークトゥルスを追尾しています。
システムとしては
・赤道儀:五藤光学 Mark-Xと2軸モータドライブ
・鏡筒:タカハシ ミューロン180C
・ガイド鏡:ZWO 30F4 MiniScope
・ガイドカメラ:ZWO ASI120MC
→鏡筒のアリガタを長い物に交換し、コバンザメ方式でガイド鏡を積載
・自動導入装置:DOG NS-5000
・ソフトウェア:ステラナビゲータ7、PHD2
です。
ノートPCとNS-5000はWi-Fiで接続し、HW VSP3 - Virtual Serial Portで仮想COMポートを割り当ててステラナビゲータと接続しています。
(Wi-Fiを使ってしまうと都合が悪いのでBluetoothでの接続に変える予定)
ガイドカメラとノートPCはUSBで繋ぎ、PHD2でオートガイドをします。
PHD2は非常に優秀で、パラメータ等を全くいじることなく、使うことができました。
ポイントはキャリブレーション時にモータの駆動速度を最も遅い速さにしないことですね。キャリブレーション中にPHD2が赤道儀を動かして学習するんですけど、モータの速度が速いままだと、ちょっと動かしてすぐに「ガイド星を見失いました」とエラーが出て四苦八苦しました。
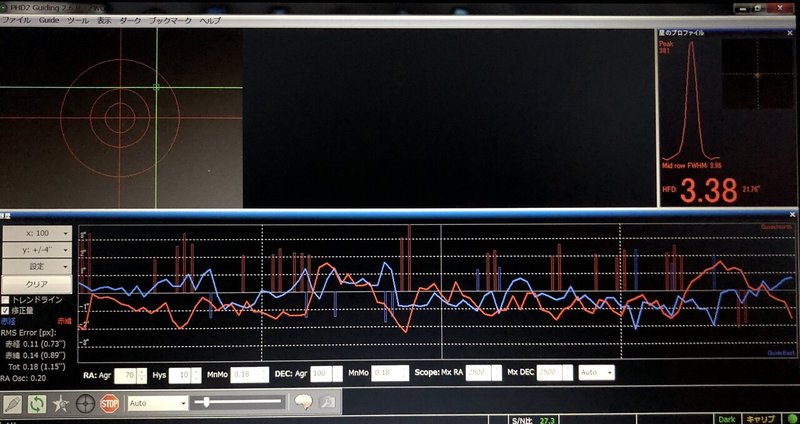
M13を入れてのガイド精度はこんなもんです。
良いのか悪いのか分かりませんw
これでデジイチやZWOをつけて撮影をしてみてどうなるかですね。
宜しければサポートをお願い致します。ご厚意は天文ボランティア活動の資金とさせて頂きます。 これからも星空に興味を持っていただけるような記事を書きたいと思っています。