ピッキングロボット作ります:#3 トルクの計算

前回はロボットアームの種類・自由度を決定しました。
今後はアクチュエータを選ぶためにアクチュエータに必要なトルクを見積もっていきます。
アクチュエータを選定するうえでは、ピッキングする対象物と、ロボットアーム本体を動かすことができる程度のトルクを把握する必要があります。
トルクを計算するためには、モーメントの計算を行います。
今回のアクチュエータの選定基準
今回はアクチュエータのトルク・質量だけを基準にして選定していきます。
ロボットアームが対象物を持って動くことができることだけを目標としているためです。
必要であれば手先の速度・加速度、位置決め精度なども考慮に入れて選定する必要があります。
しかし、今回やりたいことに対しては、そこまでの検討は不要だと判断しています。
アクチュエータのトルク(モーメント)の計算方法
今回のロボットアームは対象物を持って動くことができることだけを目標にしています。
そのため動力学などは考慮せず、アクチュエータが支える必要のあるモーメントを計算します。
中学か高校の物理(もはや記憶の彼方ですが。。。)で習った内容が基本です。
まずは以下のような1自由度(関節・アクチュエータの数)のアームを考えます。以下、ここから示す図では、左側がアームの先端、右側がアームの根元(アクチュエータ)としています。
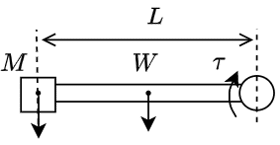
先端にかかる重力をM、リンクの長さをLとした場合、根元にかかるモーメントはMLになります。
加えてリンク自体にも重力(Wとする)がかかってきます。今回は簡単のためにリンクの重心位置はリンクの中央とします。その場合、根元にかかるモーメントは(1/2)WLになります。
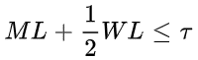
先端・リンクにかかる重力によるモーメントをアクチュエータで支える必要があるので、アクチュエータに必要なトルクはML+(1/2)WL以上必要になります。
ここまでと同様な考え方で、以下のような3自由度のアームについて考えます。
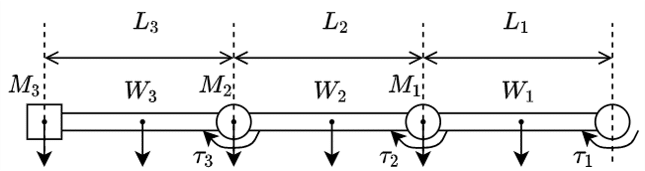
アームの一番先端に行くと、アクチュエータは直接接続されているリンク1本だけを支えられれば十分です。
しかしアームの根元に行くほど、アクチュエータは直接接続されているリンクだけでなく、そのリンクに接続されているアクチュエータ・リンクの重力も支える必要があります。
そのため、それぞれのアクチュエータに必要なトルクは、以下のように計算します。

同様の考え方でN自由度に拡張すると、以下のような形で必要トルクを計算することができます。


必要トルクの概算
アクチュエータ選定、アーム設計の前段階では、まだそれぞれの質量・長さは分かっていません。
そのため、大まかに質量・長さを仮定して、アクチュエータに必要なトルクを目安として計算します。
その後、仮定した質量、計算したトルクの目安をもとにして、アクチュエータを選び、アームを設計していきます。
アクチュエータの選定、アーム設計が進んで、質量・長さが分かった段階で、再度トルクを計算して、選定したアクチュエータで問題ないかどうかを確認します。
今回は3自由度のロボットアームを作ります。そのためトルク計算の式は上で出てきたものをそのまま使います。
手先の目標可搬質量(ロボットアームが運ぶことのできる最大の質量)を50[g]とします。可搬質量をM3に加えることで可搬質量を考慮に入れたトルクの計算ができます。
ジョイント・リンクの質量・寸法は以下のように仮定します。
・L1 = L2 = L3 = 50[mm]
・W1 = W2 = W3 = 50[g]
・M1 = M2 = 50[g]
・M3 = 100[g](可搬質量50[g]を含む)
上記の条件をもとに、各アクチュエータの必要トルクを計算してみます。

僕が調べたところ、ホビー用途で市販されているサーボモータのトルクは「N・m」「kg・cm」単位で表示されていることが多いようです。
トルクの換算式は以下のようになります。
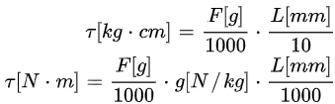
上で計算した各アクチュエータトルクを換算してみます。ここでは重力加速度を9.8[N/kg]としています。

これでアクチュエータに必要なトルクを計算することができました。
まとめ
今回はロボットアームに採用するアクチュエータを選定するために、必要なトルクを概算で求めました。
アクチュエータは、ロボットアームが運ぶ対象物、アーム自身の質量を支える必要があります。
そのためモーメントの計算をして、必要なトルクを求めました。
参考
この記事が気に入ったらサポートをしてみませんか?