STM32F303K8T6のADCとPWMの実験
実際の仕事のコーディングを始めた所、ADコンバーターとPWMを使用しなければならない事が判り、ADCとPWMを実験しました。
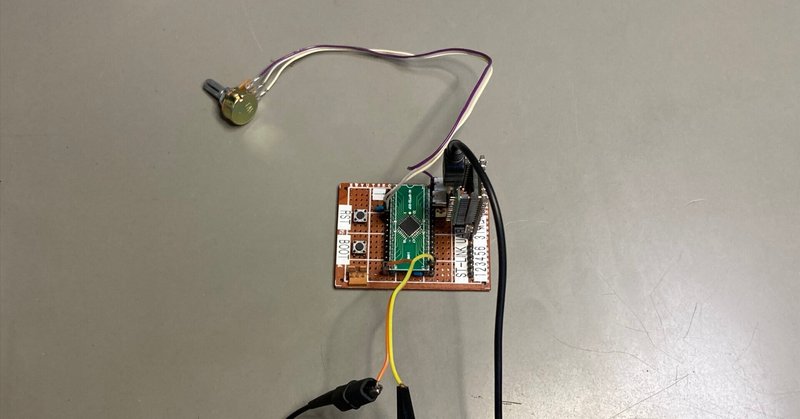
ADCに繋がった照度測定センサーで周囲の明るさを調べて、LEDランプ調光用のPWM信号を出力させます。実験はADCに可変抵抗器を接続してPWM信号はオシロスコープで計測します。
使用する全てのI/Oの設定を行っていた為、今回の実験で使用しないI/Oも設定しています。
いつもの様に自分の他の記事と重複している所は、省略しています。
STM32CubeID