GNSS測量の基礎を知ろう!~衛星測量とは?~

こんにちは!内野です。
今回はGNSS測量についてお話しようと思います。
GNSSと聞くと、RTK・PPK・VRS・キネマティック・・・・なんじゃそりゃー!!
の内容が盛りだくさんです。
しかし、ICT担当者だったら必須の内容ですので、一緒に見ていきましょう!
GNSSとは??
そもそもGNSSとはなにか一言で言えますか?
一言で言うなればカーナビです。
衛星測位システムと日本語では訳され、衛星から発射される電波を受信して、位置を確定させています。
この衛星なのですが、各国・各社躍起になって打ち上げていますね。ご存じの通り、衛星は数多く宇宙に存在しています。その衛星にも名前がついています。
GPS(アメリカ)
GLONASS(ロシア)
Galileo(ヨーロッパ)
QZSS<別名みちびき>(日本)
BeiDou(中国)
実は、GNSS測量はGPS測量と言われていました。しかし、平成23年の作業規定改正によってGPS測量からGNSS測量へと名称が変更されています。
GNSS測量の原理を知ろう!
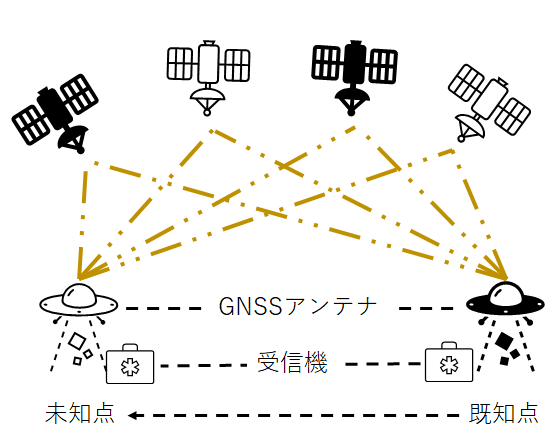
GNSS測量の原理は既知点(すでに分かっている座標)と、未知点(座標値が分からない場所)にアンテナを設置して、衛星を中継地点として未知点の座標値を求めようとする方法です。
なので、GNSS測量には必ず電波を受信するためのアンテナと受信機が必要となります。
ちなみに、既知点と未知点の距離と方向、高低差の事を基準ベクトルと言います。
GNSSによる測量方法
GNSSによる測量方法にはいくつか種類があります。
今回はメジャーなRTK・ネットワーク型RTKを中心に紹介します。
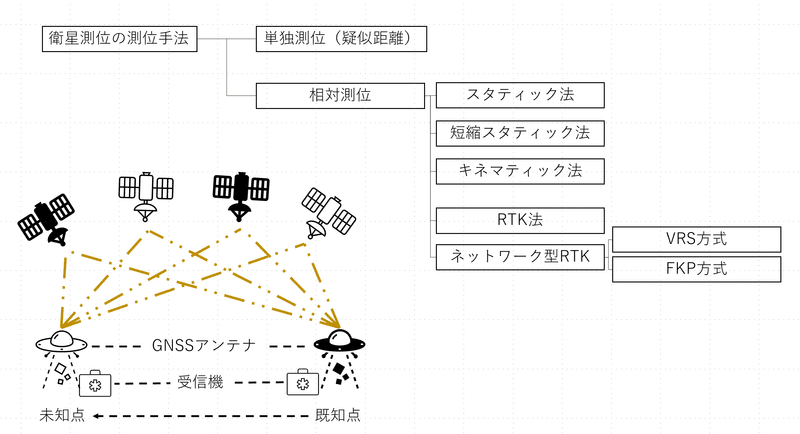
単独測位(疑似距離)
単独測位は搬送波位相(衛星から出てくる電波と思ってもらえるとよいです)による距離情報を直接利用して位置を得る方法です。
なので、補正を行わないことから基準局は不要となります。
また、衛星さえ見つかればどこでも捕捉できることから、ほぼ世界中どこでも測位することが可能です。
PPP(Precise Point Positioning)に近い方法としてPPKがあります。
(※私の認識が甘いかもしれません。近いと表現していますが、全く違う場合もありますのでご注意ください。)
PPKはドローンの測量で使う後処理方式なのですが、これはマーカーレスにて行うことができます。
私も体験したことがあるのですが、確かに楽でした。
ネットワーク型RTKの欠点はネットワークが繋がらない場所では使えないという点です。それを補うにはPPP方式が必要でした。結果としては申し分ないほど精度がでました。
ただ、技術者に伝わりづらいことや解析に多少時間がかかるということから、購入を見送っています。
<精度バチバチ君を試しました。>
高精度UAV測位システム 精度ばちばち君 (skylinkjapan.com)
※外部サイトに移動します。
スタティック法・短縮スタティック法
スタティック法は、GNSS受信機を複数の観測点に据えたのち、60分~120分程度衛星を連続受信する方法です。非常に高精度の観測ができることがメリットです。
しかし、受信機を多く設置する必要があることや時間がかかることから設置が大変だと思われます・・・。
キネマティック法
キネマティック法はGNSS受信機の1台を固定点(基準局)に据え付け、他の1台を用いて観測点(移動局)を移動しながら1分以上の順次観測を行う方法です。
これは移動局が重かったり、移動できる範囲が狭かったりとデメリットがあります。
RTK法
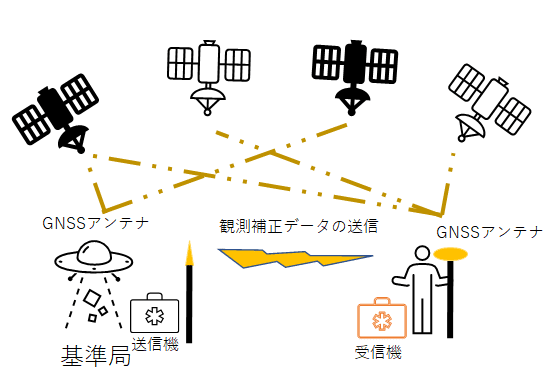
RTK(リアルタイムキネマティック)法は基準局から無線や携帯電話などにより送電された補正観測データと、新点で取得されたGNSS電波から2点間の位置を求めて瞬時に新点の座標を計算し表示させるものです。
RTK以外の方法は、移動局における受信と位置の確定に時間がかかりました。
しかし、RTK法では補正情報が入るためすぐに位置を決めることができます。
とはいえ、初期化時間や精度は衛星の配置に依存することや、基準点からの距離には限界がある事(一般的な工事では支障ない範囲です。)、また信号が中断した場合にはリスタートしづらいなどのデメリットもあります。
ネットワーク型RTK法
ネットワーク型RTK法は上記、デメリットの移動距離を解決するために開発された観測方法です。
この方法により、どのような距離でもRTK法と同等の精度で観測できるようになりました。
また基地局が不要となったことから、受信機1台で観測できるようになり、効率的な観測作業が行えるようになりました。
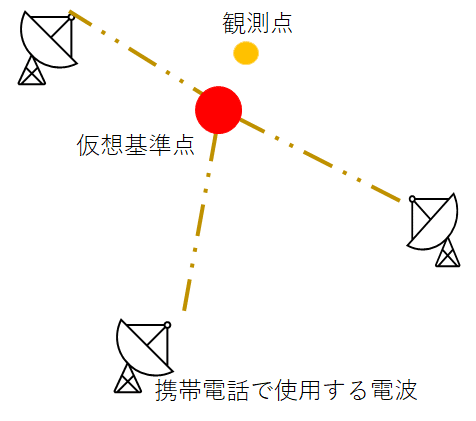
このネットワーク型RTK法の代表的な測位方法としてVRSがあります。
VRSは仮想基準点を観測地の近くに配置されることになるので、受信機にて補正情報を計算します。
このような方法でRTKと同じような計算結果を用いることができます。
しかし、RTKは携帯電話で使用する電波を使って補正情報を作るので圏外では使えないという欠点もあります。
また、ジェノバに事前登録しなければ仮想基準点を作ることはできません。
通信できるかどうか、事前に確認をしましょう。
GNSS測量における注意点
GNSS測量を行うときに最も気を付けないといけないのは、測位誤差です。
なんとなく、衛星が少ないと測位できないよな~ということは理解できると思いますが、誤差の要因と解決方法、又は事前察知できる知識を持ち合わせておくことが必須です。
測量誤差の要因
測量の誤差は何から発生するのでしょうか?
衛星クロック誤差
衛星軌道情報の誤差
電離圏伝搬遅延
対流圏伝搬遅延
マルチパス
受信機ノイズ
この6つのうち、電離圏・マルチパス・受信機ノイズを見ていきます。
電離圏電波遅延
電離圏とは、地球上空50Km~1000Kmまでの高さに電離された気体が存在する領域で、電子密度が高いほど衛星の電波を遅くするため見ておく必要があります。
電離圏(電離層)を見るにはNICT(情報通信研究機構)が出しているので、リアルタイムで見ることができます。電波の天気予報と思ってもらえると良いですね。
予報 | 電離圏領域 | 宇宙天気予報 (nict.go.jp)
マルチパス
マルチパスとは簡単に言うと、障害物に衛星からの電波が反射して受信機に受信されてしまうことにより発生する誤差です。
トタン・看板・車やビル、はたまた鉄筋などに影響するので、受信機の周りには何もないことが理想となります。
個人的には大きなヤマを正面・又は背にした場合でも発生する感じがしています。
これは様々要因があるので、確定はできないのですが大きな山等ある場合には注意が必要です。
受信機ノイズ
受信機ノイズは受信機自体に故障がある場合に発生します。定期的に検査したほうが良いでしょうあ。
また、受信機上空に草木がある場合、障害物がある場合にはほとんど測位できません。
上空には何もない事を必ず確認しましょう。(風でたまに枝が重なる~でも測量誤差の原因になります。)
山での測量をしようと思って、GNSSローバーを担いでいったことがあります。
上空には何もないと思い込んでいましたが、風で枝や葉がかぶさりRTKがFixしなかったり、中断したりして使い物にならなかったことがあります。
本当に何もない状態を確保することが大変重要です。
まとめ~正しく測位するために~
GNSSローバーを使うと、感覚として±1㎝の測位が出来ると考えています。
しかし、安定して測位するためには事前の予備知識が重要です。
また、ドローンを飛ばすときに風速を確認するようにGNSS Viewなどのアプリを利用して衛星配置の良し悪し(DOP)を判断しましょう。
DOPが小さいほど良好な配置ですので、必ず確認して測位してください。
他の記事ではLeicaGS16を利用した具体的なお話もしています。是非こちらも合わせてご覧ください。
GNSSローバーの性能と現場での使い方|内野智仁@土木現場を3D化する人|note
それでは!
この記事が役に立ったぞ!!という方はお賽銭ください!!
私のお昼ご飯が蕎麦から唐揚げ定食になります!!
この記事が気に入ったらサポートをしてみませんか?