Light-O-Ramaの手引き~ServoDog DMXマニュアル~

こちらの記事はイルミネーションの光を制御するイルミネーションショー専用ソフト、Light O Rama(ライトオーラマ,LOR)の操作方法を記事にしております。英語マニュアルということで私のような英語が苦手という方向けです。実体験と、翻訳ソフトでの解読だったりですので予めご了承くださいませ。
現在、Light O Ramaの最新バージョンはVersion5まで出ておりますが、本記事ではVersion 4.4.16で解説していきます。インストールが完了したらこちらの記事を参考にネットワーク設計してください!また翻訳サイトを利用しておりますので、若干可愛げのある文脈になっておりますのでご理解の程宜しくお願い致します。
※オフィシャルユーザーマニュアル
ServoDog DMX 14チャンネルデジタルI / Oコントローラー
プロトコル:DMX512、LOR、MiniSSC
ユーザーマニュアル:2009年10月16日V1.0を翻訳
序章
Light-O-Rama(LOR)ServoDogは、デジタル入力、デジタル出力、サーボ制御、およびPWM調光を実行できる14チャネルのデジタルコントローラーです。
6つのシングルビット入力チャネルと8つのシングルビット出力チャネルがあります。出力チャンネルは、デジタル出力またはサーボ出力として独立して構成できます。
2つの出力チャネルをPWM調光器として構成できます。これらの2つのチャネルには、オン/オフスイッチまたはPWM調光器として使用できるMOSFETバッファもあります。MOSFETは2アンペアをシンクできます。
8つの出力チャネルは完全にバッファリングされており、それぞれが5VDCで24mAをソーシングまたはシンクすることができます。入力チャネルは、単純なスイッチクロージャで使用することも、+ 5VDCロジックで駆動することもできます。
ServoDogは、WindowsServoDogUtilityで構成されます。 ServoDogはLOR、DMX512、およびMiniSSCプロトコルを自動的に検出してそれに従います。
LOR ShowTimeソフトウェアで作成されたコマンドシーケンスは、ServoDogのEEPROMにダウンロードできるため、スタンドアロンで実行できます。
Windows Showtimeソフトウェアは、シーケンス(オーディオ/音楽に振り付けられる可能性のあるコントローラーコマンド)を設計および構築するために使用されます。これらのユーザー作成シーケンスおよび/またはLORから利用可能な事前にプログラムされた音楽シーケンスは、ショーに配置されます。
これらのショーは、PCまたはコントローラーを指揮するLORショーディレクターの1人によって再生されます。
中身について
ServoDogデジタルI / Oコントローラーとユーザーズマニュアルが含まれています。このマニュアルは、www.lightorama.comでも入手できます。►サポート►ServoDogユーザーズマニュアル。
ServoDogユーティリティ
ServoDogユーティリティは、S2ShowTimeソフトウェアスイートに含まれています。無料のデモバージョンには、完全に機能するServoDogユーティリティが含まれており、ここから入手できます。http://www.lightorama.com/SoftwareDownloadPage.html
ServoDogユーティリティを使用するには、LOR RS485アダプタが必要です。SC485は、RS485アダプタへのシリアルポートです。 USB-RS485、ブースター付きUSB485、およびUSB485絶縁は、USB-RS485アダプターです。USBアダプターには、CDのWindowsドライバーとPCへのUSBケーブルが含まれています。
ハードウェアユーティリティ
ハードウェアユーティリティは、ServoDogコントローラでは厳密には必要ありませんが、他のLORコントローラと同様に、ユニットIDを設定してテストするために使用できます。ServoDogを構成するには、コントローラーに含まれているServoDogUtilityを使用する必要があります。
ハードウェアユーティリティのバージョンは、「Light-O-Ramaハードウェア」の右側のタイトルバーに表示されます。バージョン番号が2.5.0未満の場合は、新しいハードウェアユーティリティが必要です。
最新バージョンはServoDogで、www.lightorama.comからダウンロードできます。►サポート►ソフトウェアのダウンロード。
ハードウェアユーティリティの左側にある[ダウンロード]ボタンをクリックしますインストーラーを実行します.
ソフトウェア制御
ServoDogは、割り当てられたユニットIDでLORネットワークに表示されます。 8つの出力チャンネルは、シーケンスエディタで1から8までの番号が付けられた8つのチャンネルとして表示されます。個々の出力チャネルは、さまざまな機能(デジタル出力、PWM調光、またはサーボ制御)を実行するように構成できるため、LORコマンド、DMX強度、またはMiniSSC位置値に応じた動作は、特定のチャネルの構成方法によって異なります。
デジタル入力チャンネル
デジタル入力チャネルは、ユーザー入力を検知するために使用され、通常、LORショーでの対話を提供するために使用されます。押しボタンまたはスイッチの接続については、「入力スイッチの接続方法」セクションを参照してください。
入力1は、内部のスタンドアロンアニメーションシーケンスを開始するためにも使用できます。詳細については、スタンドアロン操作のセクションを参照してください。
デジタル出力チャンネル
LORネットワークでは、デジタル出力チャネルはゼロより大きい強度でオンになり、それ以外の場合はオフになります。
Shimmer(キラメキ)はデジタル出力チャンネルをすばやくオン/オフします。 Twinkleは、デジタル出力チャンネルをランダムにオン/オフします。
DMX強度が0の場合、チャネルはオフになります。
1から255までのDMX強度は、チャネルをオンにします。
MiniSSC位置の値が0の場合、チャネルはオフになります。 1〜254の位置の値は、チャネルをオンにします。
PWMチャネル
2つの出力チャネル(4と5)は、デジタル出力またはPWM調光として構成できます。これらのチャネルにもMOSFET(ピン)があります。 MOSFETは、アクティブ化されると、接続された負荷を接地します。各MOSFETは、50ボルトのDCで2アンペアをシンクできます。
チャネル4および5は、デジタル出力またはサーボ出力として構成されている場合、他のすべてのチャネルと同じように動作します。 PWM調光用に構成されている場合、デューティサイクルで256ステップを提供します。 PWMデューティサイクルは約1/4000秒。
LORネットワークでは、デューティサイクルはLOR強度に直線的に比例します。 PWMチャネルは、LOR効果の全範囲をサポートします。
DMXユニバースでは、デューティサイクルはDMX強度に直線的に比例します。
MiniSSC環境では、デューティサイクルは位置の値に直線的に比例します。
サーボ出力チャンネル
LORネットワークでは、これらのチャネルは、通常の照明コントローラーと同じようにシーケンスエディターコマンドに応答します。
0%の強度は最小パルス幅(完全に左または反時計回り)です。50%の強度は中央値のパルス幅(中央)であり、100%の強度は最大パルス幅(完全に右または反時計回り)です。
ShimmerとTwinkleは、サーボチャネルではサポートされていないことに注意してください。
DMXユニバースでは、強度がパルス幅を線形に制御します。強度0は最小パルス幅、128は中央値パルス幅、255は最大パルス幅です。
MiniSSC環境では、位置の値がパルス幅を線形に制御します。位置の値0は最小パルス幅、127は中央値パルス幅、254は最大パルス幅です。
さまざまなプロトコルのユニットID
LORネットワーク
ServoDogは、割り当てられたユニットIDで8チャネルコントローラーとして表示されます。
DMXユニバース
ServoDogは、ユニットIDで指定されたベースから始まる8つの連続したアドレスとして表示されます。 LORユニットIDからDMXアドレステーブルのセクションを参照してください。
MiniSSC
MiniSSCプロトコルでは、サーボ番号0〜7はユニットID 01に表示され、サーボ番号8〜15はユニットID02に表示されます。
ユニットIDの割り当て
ServoDogユーティリティを使用してユニットIDを割り当てることができます。「出力チャネルの構成」セクションの「ユニットID」サブセクションを参照してください。
次のように、ハードウェアユーティリティを使用してユニットIDを割り当てることもできます。
Light O Rama Windows Showtimeソフトウェアをまだインストールしていない場合は、今すぐインストールしてください。 また、RS485アダプタの1つをインストールする必要があります。詳細については、「ServoDogをPCに接続する」セクションを参照してください。
ServoDogの電源を入れます。 ステータスLEDは約2回/秒点滅します。 これは、コントローラーが起動し、PCがコントローラーと通信するのを待っていることを意味します。
ハードウェアユーティリティを起動します– [スタート]►[すべてのプログラム]►[LightORama]►[Light-O-Rama]コントロールパネルをクリックします。
画面下部のタスクバーの右側に青いハローの付いた電球が表示されます。 電球を右クリックして、メニューから[ハードウェアユーティリティ]を選択します。 [LORコントロール]タブが選択されていることを確認してください。 次のウィンドウが表示されます。
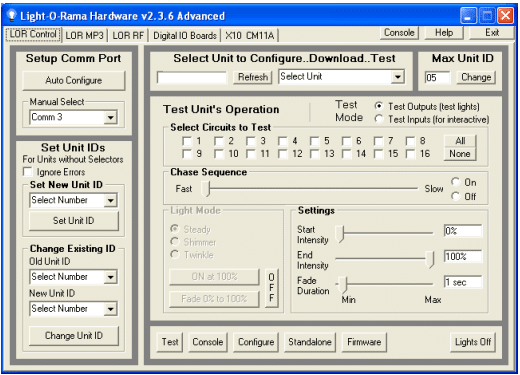
[Setup Comm Port (通信ポートの設定)]セクションの[Auto Configure (自動構成)]ボタンをクリックします。 ハードウェアユーティリティは、RS485アダプタが接続されているCOMポートを検索し、それを選択します。
ユニットIDを割り当てる場合、PCのRS485アダプタに接続できるコントローラは1つだけです。複数のコントローラーが接続されていないことを確認してください。
ユニットIDを設定/変更する手順:
[Change Existing ID(既存のIDの変更)]セクションで、[Old Unit ID(古いユニットID)]ドロップダウンメニューを使用して[select Any Unit(任意のユニット)]を選択し、すべてのユニットIDを変更するための警告ボックスで[OK]をクリックします。接続されているユニットは1つだけです。
[新しいユニットID]ドロップダウンメニューを使用して、「01」または任意のユニットIDを選択します。
[ユニットIDの変更]ボタンをクリックして、ServoDogユニットIDを設定します。 [ユニットIDが変更されました]ボックスが表示されます– [OK]をクリックします。
出力チャネルの構成
ServoDog構成ユーティリティはWindowsShowtime Softwareの一部です。このユーティリティでは、ServoDogがLORUSBアダプタを使用してWindowsPCに接続されている必要があります。詳細については、「サーボドッグのPCへの接続」セクションを参照してください。このユーティリティを使用すると、チャネルをリアルタイムで制御して、各サーボのモーションパラメータを設定できます。
以下はシミュレータ画面の写真です。

ここから先は
¥ 1,500
この記事が気に入ったらサポートをしてみませんか?