機械系に告ぐ! 電子工作を楽しもう!

ESP32,M5Stack,Arduino,RaspberryPiなど低価格なマイコンが進化してよりどりみどり.しかも,小難しい本を読まなくても,ググれば誰かが優しく教えてくれてます.電子工作環境,行き届きすぎて涙がでます.
小学生の頃から,電子工作に興味はあったのだけど,悉く玉砕してきたような気がする.兄が買ってもらった,学研から発売されていた電子ブロックというおもちゃですら,私には難しくて挫折してしまった苦い思い出がある.
アマチュア無線4級の資格試験にも1回で合格できなかった...およよ.
あれから時は流れて,50歳を越えた機械系エンジニアのオッサンの在宅机には,テスタ,安定化電源装置,電気ごて,ESP32,M5Stack,Arduino,RaspberryPi,BeagleBoneBlack,LEGO mindstorms NTX/EV3が勢揃いしている.
好きな雑誌
全然理解できないくせに,インタフェース,トランジスタ技術,日経ソフトウエア,Software Designの雑誌もふんだんに並んでいる.思い出したかのように拾い読みするので,なかなか捨てられない.部屋がどんどん圧迫されていく.最近は,電子媒体に置き換わってきた.
付録も含めて,完全電子書籍化して下さい.しかも,画像的な電子化ではなくて,文字はテキスト,図は埋め込みで,購入した人が編集できる未来が早く来て欲しい.
マイコンを使ったロボット
何なんでしょうか.世の中の電子工作・プログラミングオタクの人たちの熱量と賢さは!凄すぎる!
というわけで,Arduinoの4足ロボットが非常に面白かったので,ちょこっと紹介しておこうと思います.
このGitHubに掲載されているものとは違って,サーボモータを4つ減らしたものになりますが,私の手元にある3Dプリンタ(緑色のパーツ)で出力した4足ロボットです.3Dプリンタ持っていて,電子工作好きなら,超おすすめです!
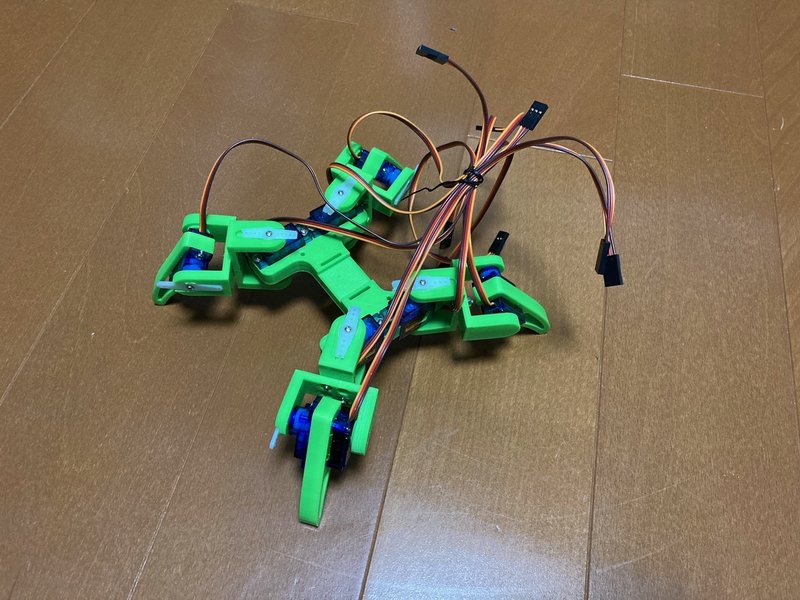
4足ロボット
プログラムはちょっと苦手!?大丈夫です!!
GitHubに4足ロボットのプログラムはたくさんあります.
先のプログラムもそうです.
実際に動かすときに躓くライブラリについて補足しておきます.
Arduinoで4足ロボットを動かすためのプログラム:spider_robot.ino の冒頭には,4つのヘッダファイルをインクルードする文が記述されています.
#include <Servo.h> //to define and control servos
#include <FlexiTimer2.h>//to set a timer to manage all servos
#include <SerialCommand.h>
#include <NewPing.h>
これらのライブラリはGitHubにありますので,.ZIPファイルとして4つともダウンロードする.
そして,Arduino IDE メニューのスケッチ < ライブラリをインクルード < .ZIP形式のライブラリをインストール…
にてダウンロードした4つのZIPファイルをインストールする.
この手順を踏まずに,単にヘッダファイル〜.hをカレントディレクトリにコピーしてもエラーがでます.
あとは,コマンドモニタの送信ボックスのところに,
w 数字 数字 と入力すれば,以下のような動作するはず.
w 0 1 stand
w 0 0 sit
w 1 x forward x step
w 2 x back x step
w 3 x right turn x step
w 4 x left turn x step
w 5 x hand shake x times
w 6 x hand wave x times
電子工作最高!これからも機械系エンジニアである私(オッサン)は,子供の頃の苦い経験をバネに遊び続けます.
だから,あなたも,ぜひ,この沼へ.ようこそ.
この記事が気に入ったらサポートをしてみませんか?