自己紹介とロボ紹介

アドベントカレンダーの前に、書き込みテストとして自己紹介をしよう。
個人ブログもやってないし、noteも見る用のアカウントだったので、ネット上で130文字以上の文章を書くなんて某部ブログ以来かもしれない。
かわさきロボットを知らない人がここに辿り着くことはないと思われるので、競技の説明は割愛。
自己紹介
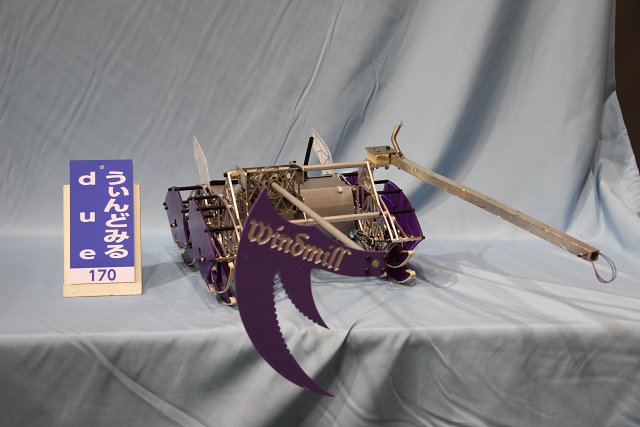
主な機体名は”Windmill”(うぃんどみる)。
サイリウムの色は紫です。
2011年東京電機大学FR科入学、自動制御研究部入部。
その後院進し、2017年から社会人になりました。
出身は静岡県、現住所は滋賀県です。
なので2011~2016年の間で本格的に活動していて、社会人になってからは立命杯やのとロボだけ参加する感じでちょこちょこやってました。
自宅に加工環境がないため、2022年ごろからは借り物の機体で参加しています。
ちなみに2013年度部長です。(もう10年前なのか…)
最近はリハビリついでに、これまであまり触れてこなかった部分(アンプとか)を勉強中なので、アドベントカレンダー以外でも備忘録的にいろいろ書けたらいいなと思っています。(思ってるだけで終わる可能性が高い)
ロボ紹介
過去の栄光に縋るのはダサいとは思っているのですが、
もう他に自己紹介することがなくなったので、過去の本大会参加機体を振り返ってまとめたいと思います。
2011年度(第18回)
一年生は4人で一台だったので操縦は別の人(◯ーくん)だった。
横回転アームに180度スライダ脚。
予選敗退。
2012年度(第19回)
初めて一人で作った機体。
ここからずっと横回転アームに120度ヘッケン脚。
もちろん上下動なんてない。
予選敗退。
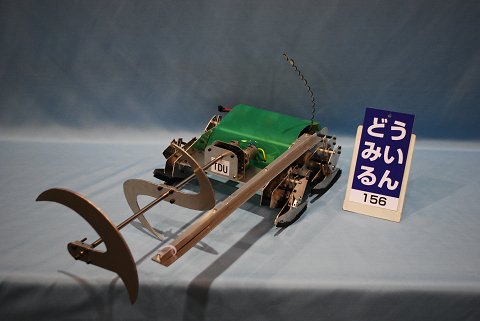
2013年度(第20回)

初めてNCで全部作った機体。
揺動ルール初年度だけど再変換OKのガバルールだったので、アームはゴイル様で円運動している。
第4位。(人生最高成績)
2014年度(第21回)
大したアップデートのない機体。
揺動ルールが徹底され”攻撃面が揺動していること”となったので、スライダ溝2mmでアームが揺動()している。
予選の初戦が不知火(宵闇)だった。
ベスト12。
2015年度(第22回)
ついにアームが4ch化。
確か2月ののとロボ目標で製作し、そのまま本大会に持ち込んだ記憶。
結局2019年ごろまでこの子を使い倒してた。
ベスト12。
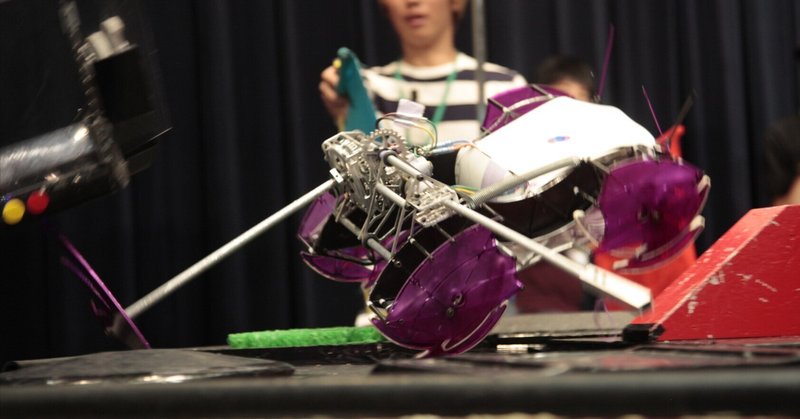
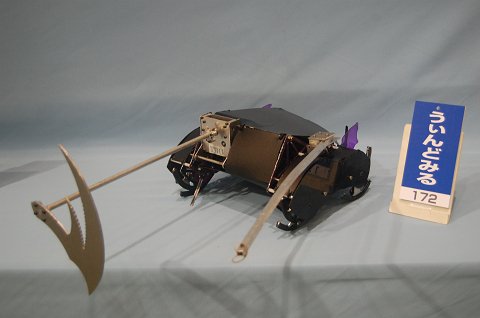
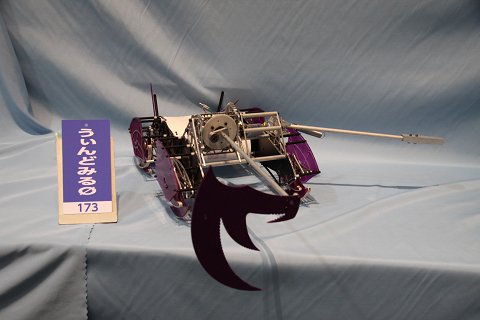
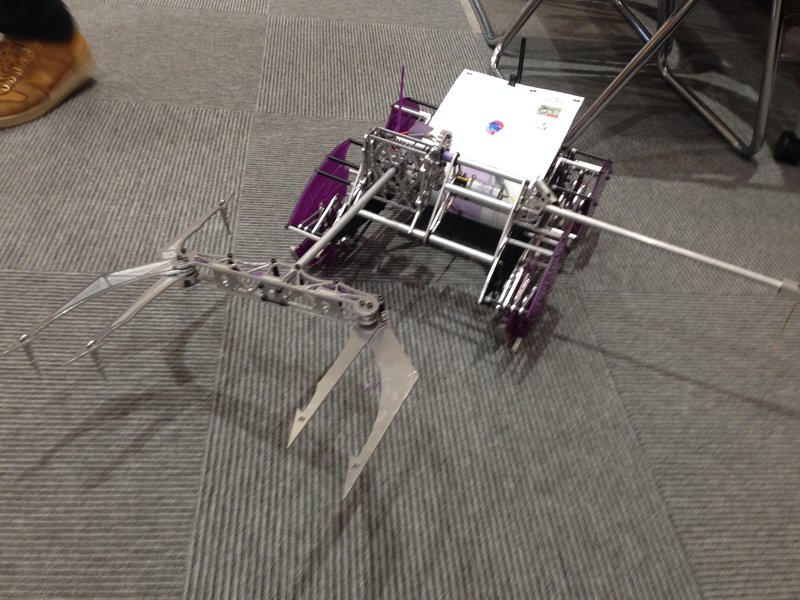
2016年度(第23回)
これものとロボ合わせでアームのみ作り直した。
爪はそれぞれ取り外し可能。
この頃大流行していた小型機がとにかく苦手だったので、以下の目標を立て設計した。
アームを回さなくても前進で攻撃できる(ガタイで押し勝つ)
攻撃箇所がアーム1回転につき2回以上
懐に入られても引っ掛けられる
しかし鎌と比べて重量過多、強度&決定力不足とまだまだ課題が多かった。
結局、余計なものを増やすと山にも引っかかって使いづらいことこの上ない。
横回転も、ロッドやシールドみたいに相手に合わせてアームやカウンターを換装するスタイルになってもいいんじゃないかとずっと思っている。
本大会までに足回りも作り直すつもりだったが、就活やら研究やらで思ったより機体をいじる時間がなく、本大会も棄権。
その後社会人へ…
と、ご覧の通り横回転一本でずっとやってきた感じです。
一部の狂人の方と違って年に一台くらいしか作ってません。
新機体はこれから設計するので、先生の次回作にご期待ください!
この記事が気に入ったらサポートをしてみませんか?