
かわさきロボットにおける電装系の紹介

今年は借り物のロボで大会参加していたのですが、一応なにか新しいことがしたいなという気分だったのでアンプの調整や比較をしました。
せっかくなので備忘録として記録しておこうと思います。(有能個人ブログ感)
と、思ったのですが記事が長くなってしまったのでアンプの比較は別の記事にします。
本記事では私の使用している電装系をざっくり説明してみます。初心者の方などは参考にしてみてください。
一応、真似する場合は自己責任でお願いします。
自分が学生の頃は先輩に相談しても「とりあえずMC402と6EX使っとけばいいでしょ」って感じだった&「それよりもメカ設計の方が楽しいし大事」という思い込みがあったので、そういった人がアンプについて考えるきっかけになってくれたらなと思い書き始めました。
でもよく考えたら学生時代は試行錯誤できるような金銭的余裕はなかったので、社会人になってから見直すぐらいでちょうどよかったのかもしれません。
“アンプ”とさんざん連呼してきましたが、これも最初は何を指しているのかわかりにくいと思っていたので、まずは電装系の構成要素を定義しておきます。ひとまずこれだけあればかわさきロボットを操縦して動かすことができるでしょう。(個数はあくまで最小構成です)
送信機(プロポ):1個
受信機:1個
ESC(アンプ):3個(左脚、右脚、アーム)
バッテリー:Ni-Cd 12セル or Ni-MH 12セル or Li-Fe 4セル
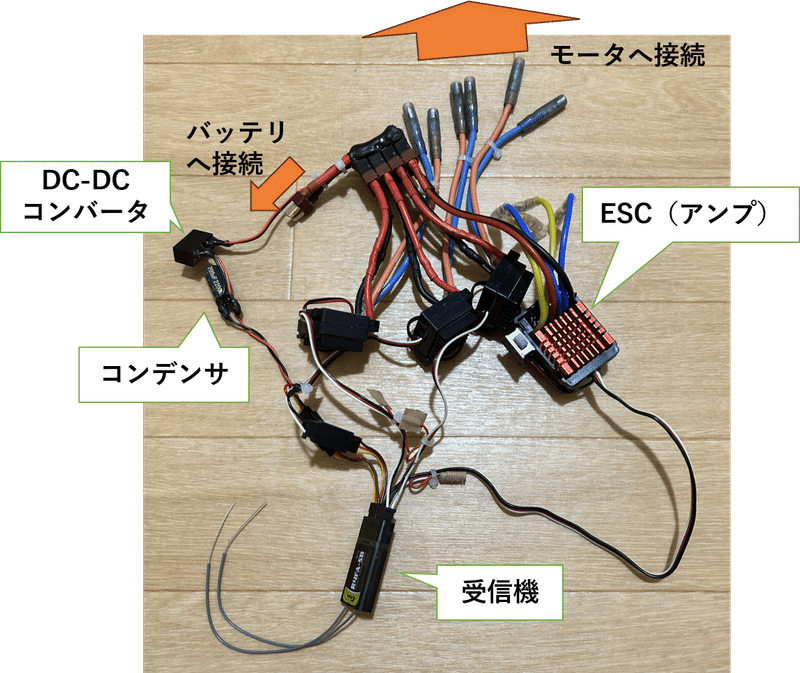
また、例としてこれが今年使っていた電装系です。基本的にはラジコン用品の転用になっています。それぞれ紹介していきます。
送信機(プロポ)
人間がロボットを操縦するときに操作する部分です。
FUTABA製品の6EXを使用しています。単三電池8本も使うため非常に重たく、コスパも悪いので同等の電圧が出るリポバッテリに換装しています。


受信機
プロポからの無線信号を受信し、ESC(アンプ)に指令を送る部分です。
プロポに同梱されている受信機は6CHぐらいありますが、かわロボですべてのCHを使用するのは稀なので、CH数を絞った小型軽量受信機の代替品を使用しています。

ここで注意なのですが、使用するプロポによって通信規格が異なります。
私のプロポは6EXなのでFASSTという規格ですが、
現在主流の6J等ではS-FHSSという規格です。
代替品を買う際にはプロポの通信規格をよく確認しましょう。(一敗)

ESC(アンプ)
Electric Speed Controllerの略で、受信機からの指令を受け、モータへ伝える電流の大きさや向きを制御する部分です。これがいわゆる"アンプ"と言われています。
試合中に発煙した場合、大体モータかここが燃えています。モータが燃えたときは焦げ臭い匂い、アンプが燃えているときはツンとした匂いがします。(初心者でも一度嗅げば判断できるようになると思います)
ちなみに、アンプは「音響を表現した電気信号を増幅する機器」というのが本来の意味で、ラジコン用ESCが「アンプ」と呼ばれている理由は不明らしいです。
いかがでしたか?
かわロボで最もメジャーなアンプはFUTABAのMC402CRです。
私が学生の頃は他の選択肢はほぼありませんでした。(さらに昔は大会支給のESCとかあったらしいですが)
今回はこのアンプ部分をいろいろ買って試してみたので、後ほど別記事で比較してみます。

バッテリー
主にLi-Fe(リチウムフェライト)を4セル直列で使用しています。
4セルで一個のバッテリは入手しづらいので、2セルを2個直列で接続して使用しています。この場合、6.6 × 2 = 13.2 [V]がロボットを動かす電源となります。

ここが問題なのですが、ほとんどの場合かわさきロボットではパワーを得るためにアンプの定格を超える電圧をかけています。(厳密にはサイドワインダーなどの定格が高いアンプもありますが)
MC402CRの定格電圧は4.8V〜7.4Vのため、約2倍の電圧をかけていることになります。そのため、モータがロックしているのに操縦を入れっぱなしにしたり、どこかがショートしたりすると、すぐに発熱→発煙→発火となるわけです。
BEC(DC-DCコンバータ+コンデンサ)
上記で述べたように、アンプには無理やり13.2Vをかけているのですが、受信機はそうもいきません。(受信機の定格電圧はだいたい5V)
そのため、バッテリ電圧を受信機の定格電圧に変換してあげるのがBEC回路の役割になります。
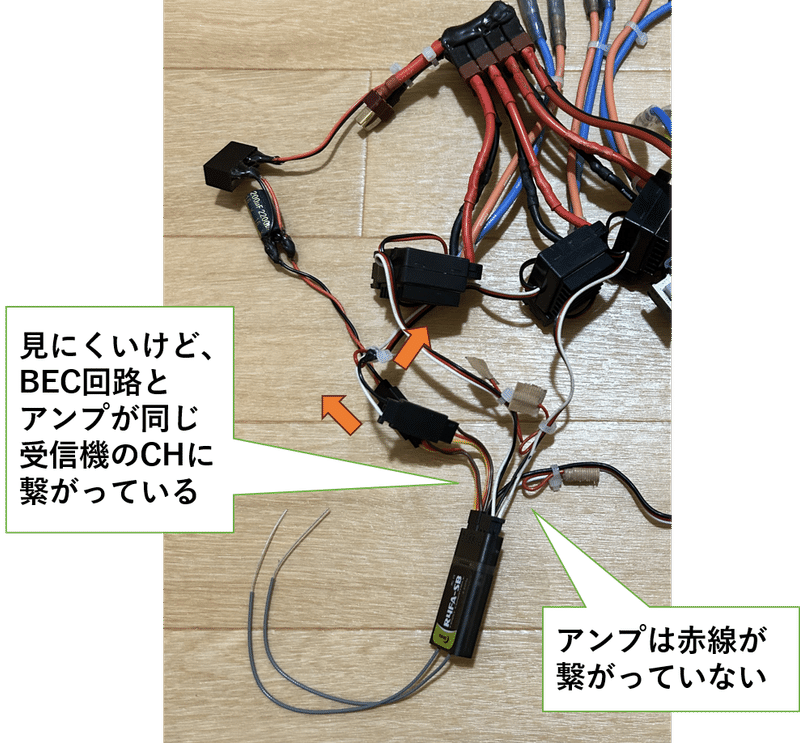
実はアンプの内部にもBEC回路があり、受信機へ繋がる赤い信号線が5Vに変換された電圧を供給しています。
しかし、製品ごとに供給する電圧が違ったり、どれか一つのアンプが死亡したりすると、このBEC回路から電流が回り込み、他のアンプや受信機を道連れにして死亡する場合があります。
なので、最低限、受信機へ繋がる赤い信号線は1本だけにしておきましょう。
また、単体でアンプが壊れた場合でも、細い線径に大電流が流れて発火することもよくある話です。
可能であれば、アンプから受信機への赤い信号線はすべて外し、バッテリから直接電力を供給するようにBEC回路を用意することをおすすめします。
そうしておけば互換性も高まり、今回の私のようにいろんなアンプを入れ替えて使用している場合でもいちいちどれを残すか考えなくて済みます。
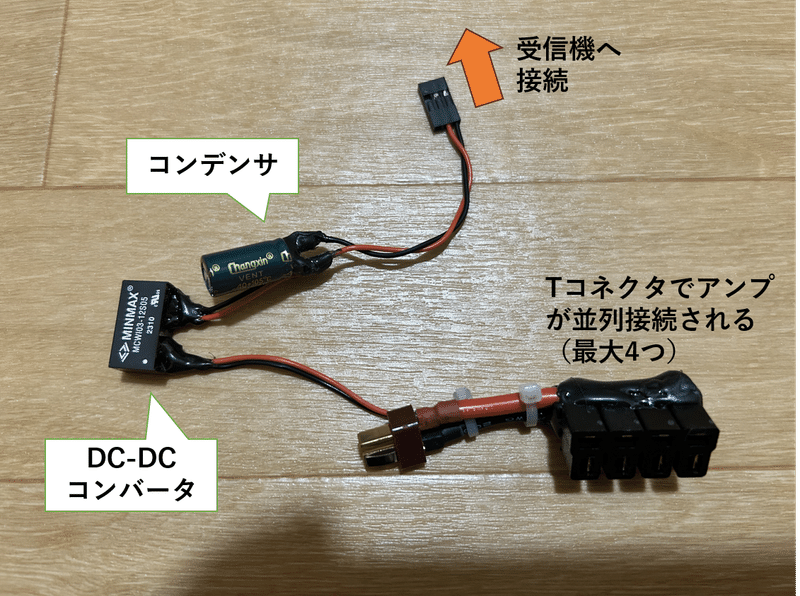
まずは、DC-DCコンバータでバッテリ電圧を受信機の定格電圧5Vまで落としています。使用しているDC-DCコンバータはこちらです。
DC-DCコンバータとは、DC(直流)をDC(直流)へ変換する機器ですが、実際はDC(直流)で電圧を変換する装置のことになります。それぞれ動作可能な電圧範囲が違う電子機器の間で、個々に見合った電圧を作る必要がある際に使用されます。
元の電圧より低い電圧を作るものを『降圧コンバータ』、元の電圧より高い電圧を作るものを『昇圧コンバータ』と言います。
今回の使い方では降圧コンバータですね。
その後、コンデンサを通して受信機に接続されています。ここでのコンデンサの役割は暴走対策です。
かわさきロボットのように激しくロボットが動く場合は、アームの動作等で瞬間的に大電流が出力されることがあります。そのときにバッテリの容量が少なかったり、そもそもバッテリが傷んでいたりすると、受信機へ供給する電力が不足し、受信機の電源が落ちてしまう場合があるのです。
一瞬だけでそのまま再起動してくれたらいいのですが、落ちている間はロボットが制御不能になりますし、アームを動かす度にそれが繰り返されるかもしれません。(そもそも試合中にそんなことしていたら負けます)
コンデンサがあれば、そこに貯めておいた電荷で一瞬の電力不足をカバーすることができ、ロボットの停止や暴走を防ぐことができるのです。
私の場合はBEC回路上にコンデンサをつけていますが、FUTABAさんから受信機の空きCHにつける以下のような製品も出ています。どちらも効果は同じです。
また、もしも受信機の空きCHがない場合は、並列接続できるコネクタを使って、アンプと一緒に接続しておけばOKです。
「アンプを燃やしたり、暴走させたりするのは焦っているからで、操縦に気をつければそんなの起こさないよ。」と思った方もいるかも知れません。
これは断言しますが、試合中に「アンプに優しく操縦しよう」とか考えてる暇なんてないです。どんな人でも試合に勝ちたければ多少のムチャはしますし、「燃えてもいいからあとちょっとだけ動いて!」ってときは意外とあります。(まぁ、そもそも本大会では煙が出たら負けなのですが)
ロッドや鎌が入り込んで配線にダメージを受けるかもしれませんし、使用したバッテリが傷んでいるかもしれません。アクシデントというのは予想していないときに起きるからアクシデントなので、転ばぬ先の杖として電装系を守る手段、燃えても被害が広がらない手段は備えていたほうがいいと思います。
ちょっと極端な言い方をしましたが、アンプが燃えると精神的にもおサイフ的にもダメージが大きいので皆さん気をつけましょう、というお話でした。
思ったより長くなってしまったので、電装系の紹介はここまでとします。
アンプの比較については別記事で公開しますのでしばらくお待ち下さい。
ここまでご覧いただき、ありがとうございました。
この記事が気に入ったらサポートをしてみませんか?