関東ブロックの機体について

どうもお久しぶりです。fTomoです。
今回はそろそろ心の傷が癒えてきたので関東ブロック機についての記事を書こうと思います。
まぁいつも通り自分は基本的に回路しかできないので回路の解説が多めになります。
機体の概要
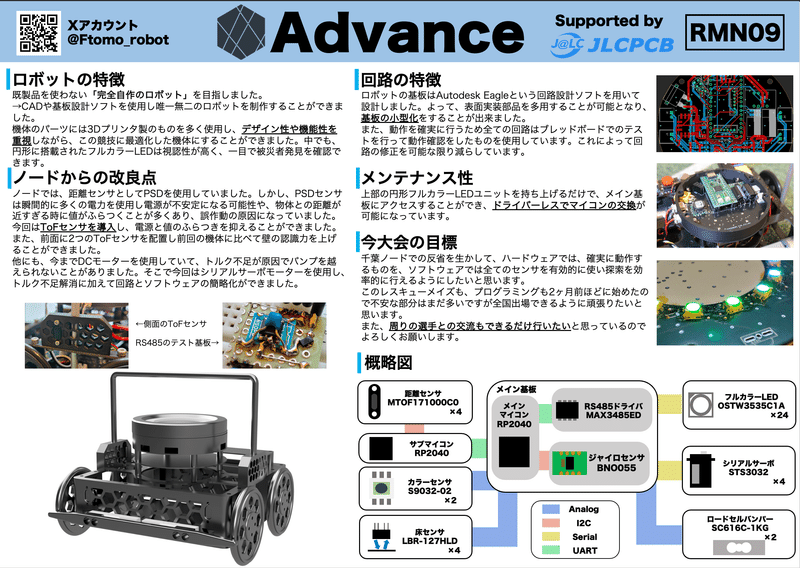
千葉ノードと大きく違う点が
DCモーター→シリアルサーボ
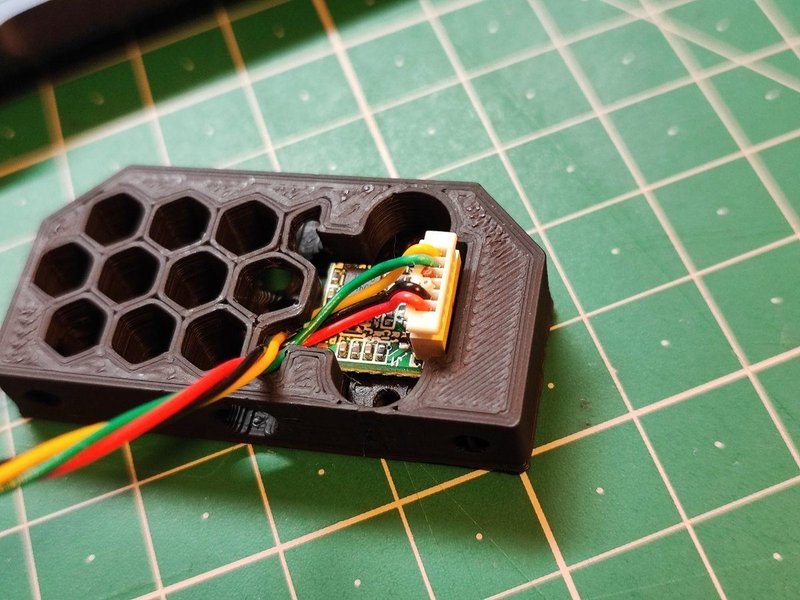
PSDセンサ→ToFセンサ
サブマイコンの増設
この3点です。
モーターに関してはトルクの問題や、制御のしにくさからレスキュー競技に向いていないと判断して、シリアルサーボに変更しました。
PSDは至近距離になった際に値が不安定になる仕様であったりノイズの原因になりやすいと教えてもらったので、ToFセンサに変更をしました。
また、ToFセンサはI2Cでの通信だったためサブマイコンとしてXIAOのRP2040を追加し、壁の有無の処理はサブで行うようにしました。
その他の部分はノード機の流用になります。
ソフトウェア
まぁあんまり話すことないのですが、
ノードからの主な変更点は、先ほどの変更点をソフトウェア側でも変更しただけです。
強いて言えばセンサーの個数が増えたので、そのセンサーに対応したif分であったりを追加しました。
ハードウェア
ハードに関しては今回もJLCPCBさんのサポートによっていただいた基板やフレームを使用しています。
JLCPCBについて
JLCPCBとは、PCBサービス始めとしたロボット制作に欠かせない会社です。PCBだけではなく、3DプリントやCNCサービスも格安で行っているので電子基板からフレームまで幅広くロボットに活用できます。
今なら新規ユーザーに$54の無料クーポンを発行して下さっているらしいので、どこの会社に注文しようか悩んでいる人がいればJLCPCBをおすすめします。

基板について
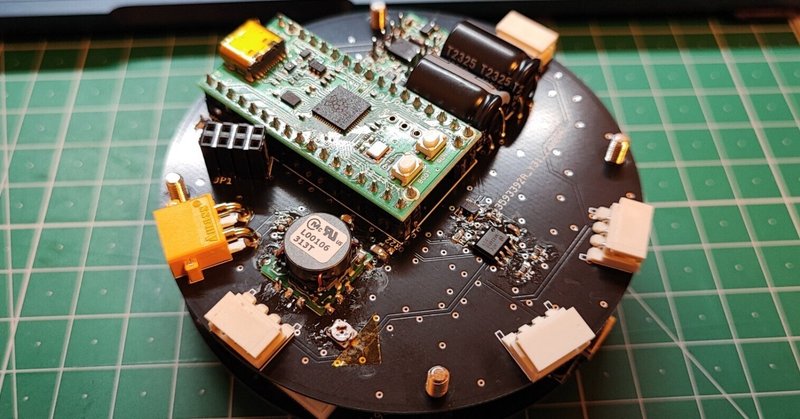
今回発注したのは、メイン・サブ・電源の3種類の基板です。
メイン基板は前回DCモーター用のモータードライバが4つ載っていたのですが、シリアルサーボに対応させるためRS485ドライバを載せました。
RS485ドライバには
を使用しました。
電源は5Vを用意しないといけないというトラップがありましたが、それ以外はしっかりと動いてくれました。
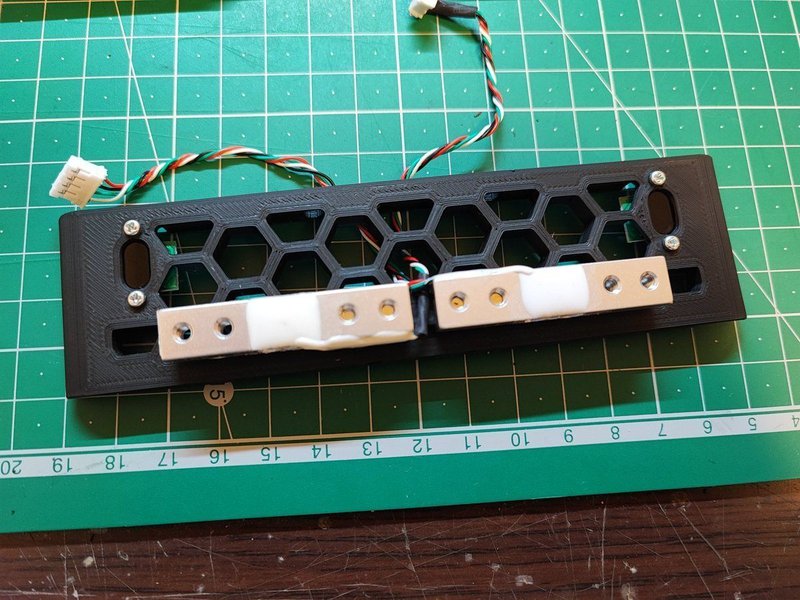
サブ基板はメイン基板と4ピンのピンヘッダで接続ができるようにして、LED基板を合わせて3枚の基板をスタックできるようにしています。
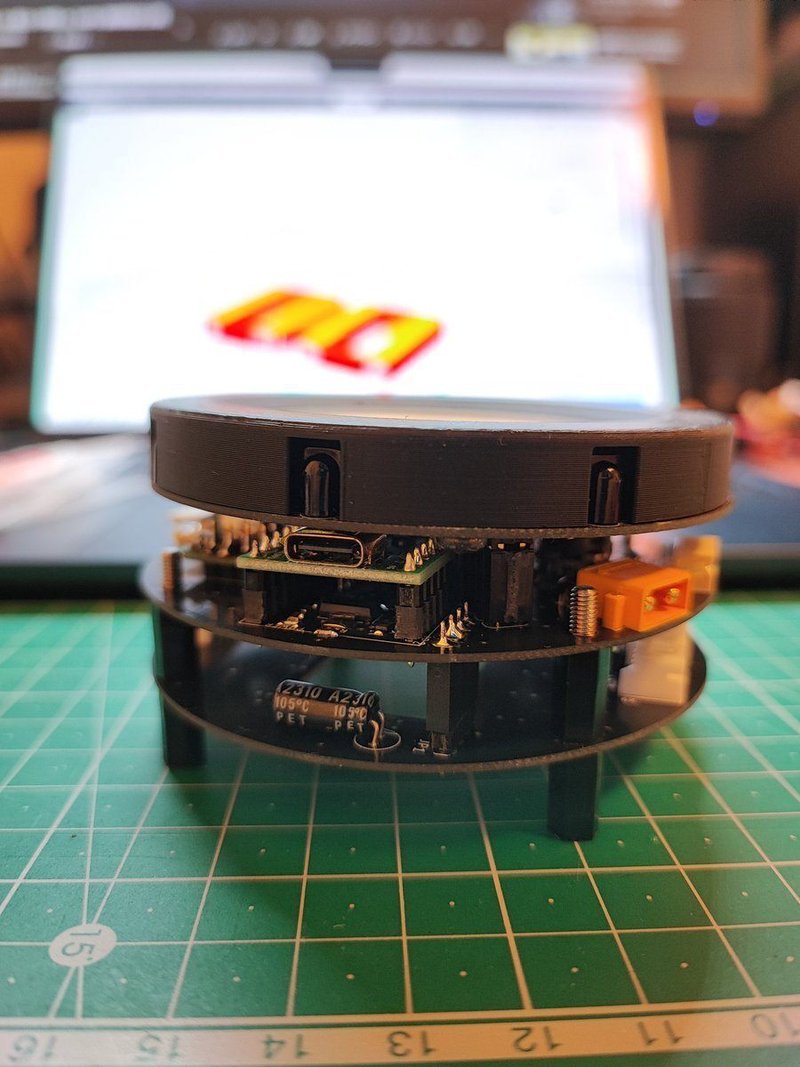
めちゃかっこいい
久しぶりに見たけどやっぱかっこいいな
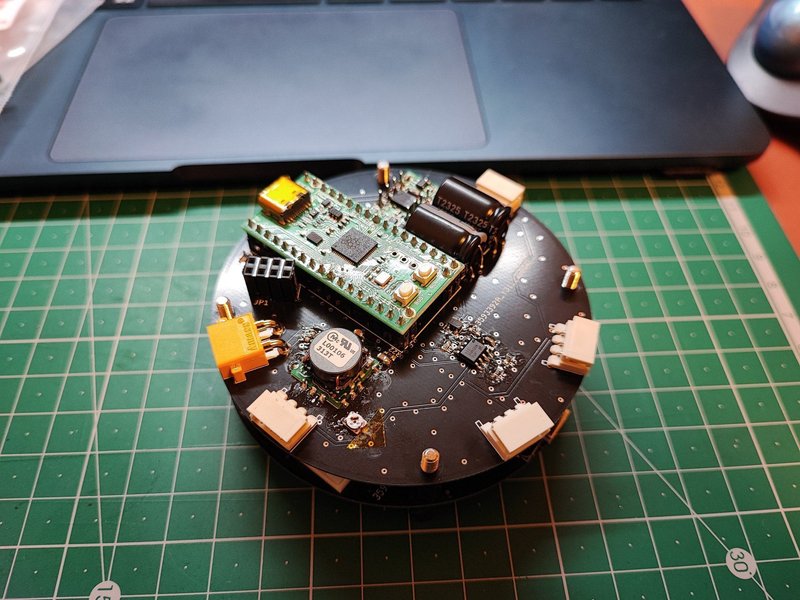
最後に電源基板です。
これはモーターの変更に合わせて、リポバッテリーを3Sから2Sに変更したためXT60コネクタからXT30に変更するために再設計しました。
JLCは基板の色変更が無料なので、せっかくなのでライトウェイトをやっていた時にルールの都合上頼めなかった青色の基板にしてみました。
基板届きました!
— fTomo (@Ftomo_robot) December 19, 2023
今回もありがとうございます!@JLCPCB_Japan @JLCPCB pic.twitter.com/XRaEySBQSJ
青もかっこいいですよね。
個人的には紫も好み
せっかくなのでポスターと動いているところも紹介します
走破性能高いね pic.twitter.com/1ndGRY9fbH
— fTomo (@Ftomo_robot) January 5, 2024
最後にJLCPCBについて
例えば、実際にセンサーのパッドの穴を開け忘れたままガーバーデータを提出した時に確認のメールが届き、修正版を待ってもらったこともあります。このように価格も他の基板会社よりも安く、サポートも手厚いので基板作成
を頼む際はJLCPCBをおすすめします!
さらに、今回は発注後1週間以内に届きました。製造も輸送もスピーディーで輸送の会社も複数社から選べたりと柔軟性が高い点も個人的には嬉しいです。
今なら新規ユーザーに$54の無料クーポンを発行して下さっているらしいので、どこの会社に注文しようか悩んでいる人がいればJLCPCBをおすすめします。
おわりに
最後まで大会の結果は書いてませんでしたが正直に言います。
負けました。
結構しっかりと負けました。
その記事はまたいつか書こうと思います。
次回はPCBAのデータの作り方・発注方法を記事にしようと思っているのでお楽しみに!
この記事が気に入ったらサポートをしてみませんか?