#3. 仮想世界のシミュレーションが車両開発をどのように助けるか?

こんにちは、Virtual Motorsport Labの山下です。
自動運転に興味がある初学者向けの記事を書いています。今回は自動運転車を開発する上では欠かせない、自動運転シミュレーションについて紹介します。仮想世界のシミュレーションが、どのように自動運転開発を支えているのかを見ていきましょう! (前回の記事は下記)
(1) 自動運転シミュレーションの利点
自動運転タクシーなどを運営するWaymoでは、1日に2000万マイル(約3200km)以上をシミュレーションで走行しています[1]。
シミュレーションを自動運転に活用する利点は何なのか?
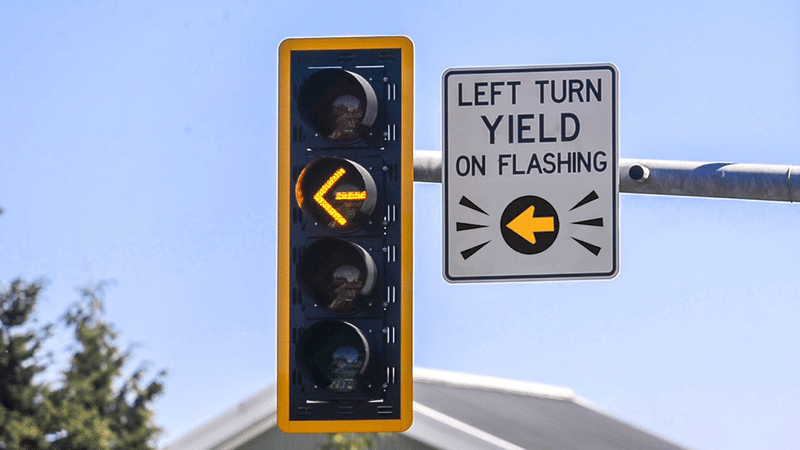
例えば、アリゾナ州には人間ドライバーでも走行が難しい交差点があります。この交差点には、左折用の黄色矢印の点滅信号機が設置されています(下図)。この信号では、黄色の矢印が点滅したら、歩行者や自転車を含む対向車に譲った後、慎重に交差点に進入して左折することが許可されます。この信号は、アリゾナ州のみの特別な信号ではなく、カリフォルニア州やネバダ州でも使われています[2]。
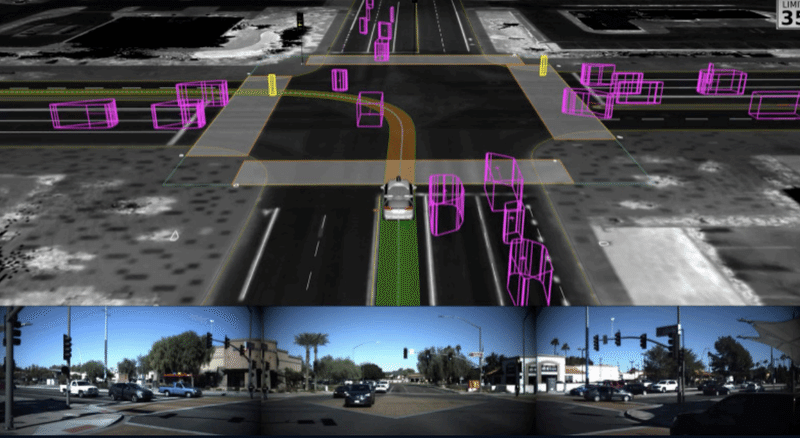
下図の交差点では交差点は5車線あり、自車の走行経路に歩行者が横断歩道を渡っています。その中で、自動運転ドライバーは、安全に左折出来るタイミングで判断しなければなりません。判断を誤ると事故が発生する一方で、安全性だけ考慮して、全く車両が来なくなるまで停止していると、後続ドライバーに迷惑が掛かかります。
このような現実世界では稀にしか発生しないが、自動運転システムが対応すべき状況は、シミュレータの利点が最大限活用できる状況です。以下では、この黄色矢印で左折する交差点を例に、シミュレータの使い方を説明していきます。
(2) どのようにシミュレータを使うか?
(2-1) 高精細な仮想世界のレプリカを作成
先ずはセンサーデータを活用して、高精細な仮想世界を作成します。仮想空間に交差点のレプリカを作るイメージであり、車両レーン、カーブ、信号などを完全に再現します。
シミュレータを使って高速道路の定常走行テストをしても得るものは少ないです。テストでは交差点の黄色信号、逆走車両、素早く進行方向を変更する自転車などを想定した出来るだけ複雑な状況に焦点を当てることが多いです。

(2-2) ドライブ、ドライブ、そしてドライブ!
上述した黄色点滅信号が設置された交差点を左折するシチュエーションを、デジタル化します。このシナリオを使って、自動運転ソフトウェアは何千回ものテスト走行を重ねることが出来ます。またソフトウェアをアップデートするごとに、同じ交差点でテストが可能となります。仕様変更前との比較も可能です。
このようなテストを繰り返すことで、黄色点滅及び5車線レーンの交差点という複雑な状況でも、対向車の間隔を見つけてスムーズに前進出来るようなります。
さらにソフトウェアを改善するため、この交差点で学んだことを、これまでに遭遇した黄色点滅の左折シーンを使ってシミュレータでテストします。このようにして、実機テストのみを行うより速いスピードでソフトウェアを改善していけるのはシミュレータの強みです。

(2-3) 何千パターンのシナリオ駆使する
次に、何千もの可変的なシナリオと "もしも "の可能性を探っていきます。
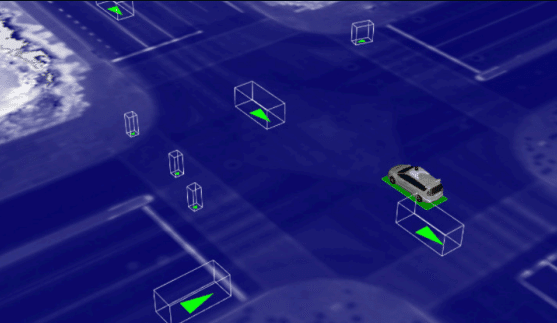
ファジングと呼ばれるプロセスを経て、対向車の速度や信号のタイミングを変化させ対向車の速度や信号のタイミングを変化させても、車両が安全な車間を見つけられるかを確認します。走行シーンには歩行者、オートバイの割込み、ランニングしている人の急な方向転換などを追加することが可能です。
経験済のシナリオ変更だけでなく、現実世界では遭遇したことのない完全な仮想シナリオを作成することもあります。このように、さまざまなシナリオを経験することで自動運転システムの挙動を深く理解することが出来ます。

変えているイメージ図 (出展:Waymo Safety report 2021)
(2-4) 現実空間での検証と仮想空間での反復
上述のシミュレーションを通して、黄色点滅信号で自動運転システムが安全に左折する方法を学びました。この学習スキルを現実空間のプライベートコースでテストして検証します。
もし必要なら、またシミュレータでのテストが繰り返されます。
(3) まとめ
自動運転を開発する際のシミュレータの活用方法を説明しました。もちろんシミュレータで完全に現実世界を再現することは困難です。
しかしシミュレータでは、現実空間で稀にしか発生しない状況を再現でき、また現実空間では再現困難なシナリオを作りテストすることも出来ます。本記事の参考としている”Waymo Safety Report2021" では自動運転の安全を確保するために、現実空間での公道テストの2000万マイル以上に対して、シミュレータ走行テストは150億マイル以上と発表されています (ざっくりですが、公道の1000倍くらいはシミュレータで走行)。
そのため自動運転システムを開発するために、シミュレータは非常に重要な役割を担っています。
読んで頂いてありがとうございました!
--
Virtual Motorsport Lab Inc.について
自動運転レーシングカーの開発体験を通して、自動運転や自動車ソフトウェア技術の基礎が学べるサービスです。現在は教育機関に提供中。個人ユーザへの提供も年内に開始予定です。ご興味あれば、以下のHPに登録フォームがあるのでご登録頂ければ嬉しいです。
参考文献
[1]https://downloads.ctfassets.net/sv23gofxcuiz/4gZ7ZUxd4SRj1D1W6z3rpR/2ea16814cdb42f9e8eb34cae4f30b35d/2021-03-waymo-safety-report.pdf
[2]https://www.roseville.ca.us/news/what_s_happening_in_roseville/flashing_yellow_left_turn_signals_foothills_blvd
自動運転とモータースポーツのテクノロジーについての記事を書きます! 未来に繋がるモータースポーツを創りたいです!