
Revopoint Range vs POP3 vs Shining3D Einstar

Shining3D Einstar と Revopoint Range と POP3 を使い比べよう、という趣旨の記事です。登場する機材は全部自腹切ってます。メーカーの宣伝じゃないよ。
ハードウェア
見たまんまなので詳しい解説は省略。



小物のスキャン
比較のために簡単な被写体を選んだ。
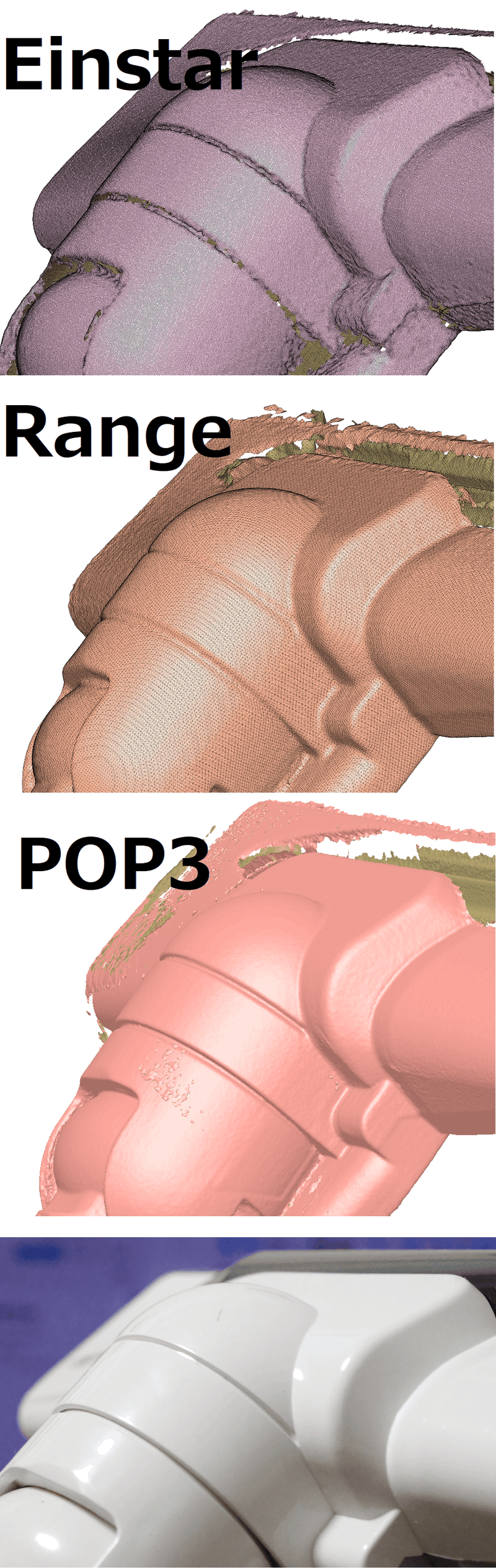
石膏像
ディティールの再現度を評価しやすい。



RangeはEinstarやPOP3と比較してメッシュの細かさ(≒測定点の多さ)は一段劣る。POP2くらいの品質かな、という感想。スキャナに搭載されているデバイス(カメラ・SoC)が似たようなものなのか、使用感もRangeはPOP2と似ている。
トポロジーが違うが測定点の細かさはPOP2並みか、ちょっと良いくらい。

RangeとEinstarは細部形状を撮りづらい。POPシリーズやCR-Lizardなどの小型機種と比べて、IRプロジェクタとカメラの設置間隔が広くなったことによるものだと思う。こういう感じ。


一方、Einstarはメッシュが細かい(≒測定点が多い)。Revopoint POP3と同程度でRangeより良い。ただしEinstarはスムージング無しでデータ処理したせいか面が荒れ気味になっている。
ヘルメットのスキャン
手ごろな大きさのスキャン対象として、とりあえずヘルメットをスキャンしてみた。左手をヘルメットの中に差し込んで、右手でスキャナを持つ形で作業した。
Einstarは一発で撮れた。2-3回繰り返すうちにコツをつかんで素早く撮れるようにもなった。
一方で、Rangeはトラッキングが弱くスキャンは成功しなかった。もっと工夫すれば撮れるのだろうが、腕が疲れたので止めにした。
撮ったのはこのヘルメット。

Range のヘルメット撮影風景
やっぱRevopointはトラッキング弱いなぁ。大きなものだと特に面倒だ。 pic.twitter.com/VfMZ50mw4i
— capbolt (@hex_cap) July 4, 2023
Einstarのヘルメット撮影風景
ヘルメットまるごとを、1分で3Dスキャン一発取りできました。 pic.twitter.com/5omrxo98Hn
— capbolt (@hex_cap) January 29, 2023
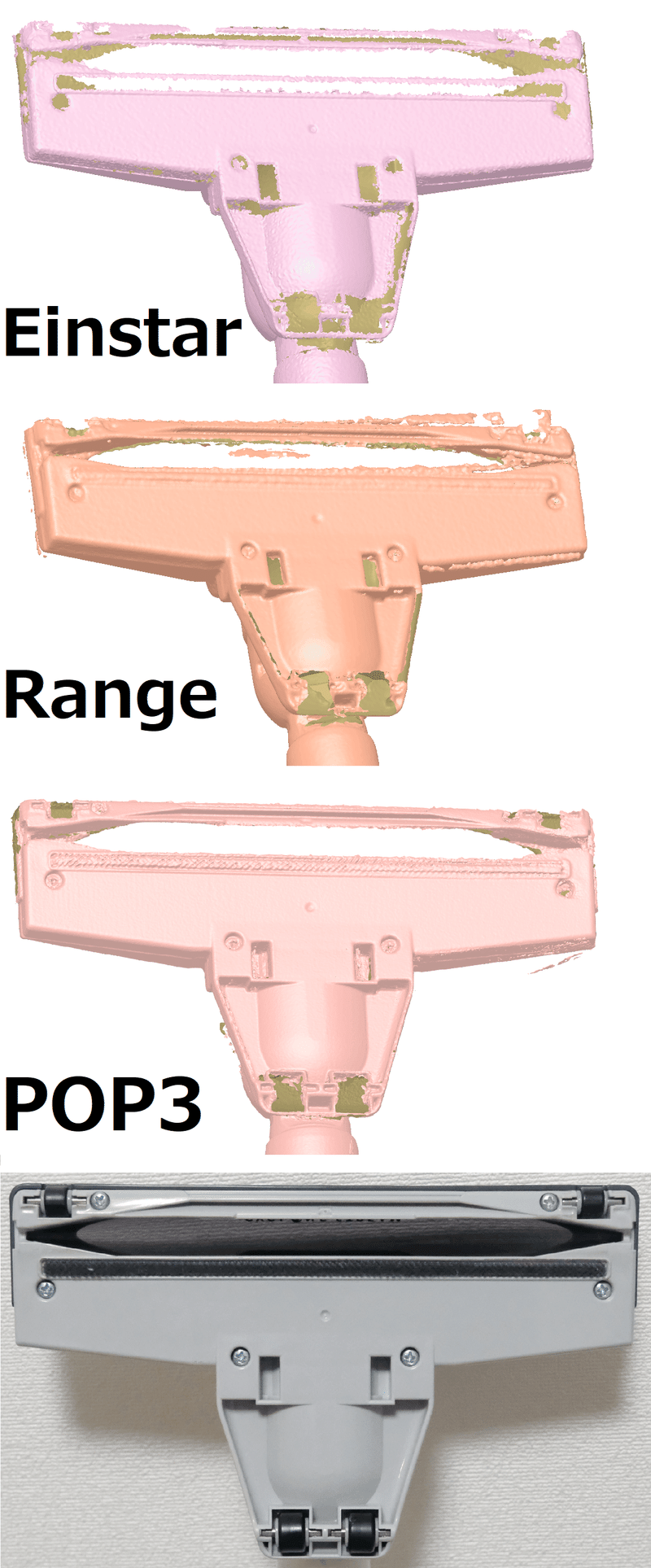
掃除機のノズル
まぁもうちょっと実用的なものもスキャンしましょう、ということで掃除機のノズルをスキャンすることにした。
EinstarもRangeもPOP3も何回か練習は必要だったが撮れた。


Range の掃除機ノズル撮影風景
平均fpsは11-12fpsで推移していた。(この場合のfpsは1秒間に何回データを取得しているかという指標)
Einstar の掃除機ノズル撮影風景
平均fpsは8-10fpsで推移していた。Revpointより少し悪い。なお、スキャン中にタスクマネージャでパフォーマンスを監視していたが、CPU、RAM、GPU、ストレージいずれも余裕がありボトルネックにはなっていないようだった。
POP3 の掃除機ノズル撮影風景
平均fpsは12-14fpsで推移していた。
掃除機スキャン結果
細部の欠損に関してはRangeのほうが少ない。一方でノイズというか小さなゴミデータはRangeやPOP3のほうが多い。
ノイズ量(ゴミデータ量) Einstar > Range > POP3

黒色部分はRangeのほうが若干よく撮れている。吸い込み口下のブラシ部分はRangeのみ撮れている。ローラーはどちらも撮れていない。
黒色撮影 POP3 > Range > Einstar
メッシュの細かさはEinstarが良い。
スキャン密度の高さは細かい溝の再現度などに表れている。この2つの溝の幅は1mm、深さは2mm。
Rangeはスキャン密度がそれほど高くないので溝の形状がなまされている。Einstarは溝の底と側面はうまく撮れていないものの、エッジが表現できており再現度が高い。POP3が一番良く撮れている。
スキャン密度 POP3 ≧ Einstar > Range

まとめ
ノイズ量(ゴミデータ量) Einstar > Range > POP3
黒色撮影 POP3 > Range > Einstar
スキャン密度 POP3 ≧ Einstar > Range
トラッキング(スキャン容易性) Einstar > POP3 ≧ Range
一長一短あり、どのスキャナがベストであるとは簡単には言うことができない。
私は 小物スキャンはPOP3、大きなモノは Einstar をそれぞれ使い分けることにした。
大きなモノのスキャンで一番ストレスなのは撮り直しになること。
そもそも3Dスキャンは神経を使う仕事だ。大きなモノを撮影すると1回5分以上、10分や15分かかることもある。ずっと集中していてスキャン作業を繰り返すなかで、やり直しが確定するのが一番つらい。
Revopointはトラッキングが弱く特徴点が少ないところで「ワープ」するクセがある。機種に限った話ではない。この「ワープポイント」は撮ってみないとわからない。
Revopointは特徴点少なくなると亜空間にワープするクセがあるんだよなー pic.twitter.com/AvdKN2j6TA
— capbolt (@hex_cap) July 16, 2023
小物スキャンならスキャン1回あたりの時間が短いので「ワープ」が起きてもまだ許せる。が、大物だとストレスフルだ。
対してShining 3Dのスキャンソフトは特徴点が少ないと早めにギブアップしてスキャンを一時中断するので「ワープ」が発生しづらい。というか遭遇したことが無い。それでいてスキャン再開時の位置合わせが素早く確度も良くてめったに失敗しない。なので大きなモノにはEinstarを使いたい。
Shining 3DのスキャンソフトはRevopint比でノイズ処理も強めに作用しており出来上がった3Dデータにゴミが少ない。まぁ、これはエッジや細部のディティールがカットされてしまう副作用もあるが。
大きなモノを撮るときは、大まかな形を精度よくゴミも少なく撮れるEinstarで撮ってから、撮りきれなかった細部のディティールをPOP3で撮ってあとから合体させるなり組み合わせて使う、というのが現実的な選択肢なのではないかと思う。
この記事が気に入ったらサポートをしてみませんか?