ロボットに写真を撮らせる <レリーズユニット実験>

普通のカメラをロボットに操作させるというコンセプトで、今年はなにかを製作しようと目標を立てました。
いきなり精巧な手を持つヒューマロイドを作ってカメラを操作させることは難しいので、まずはリモートレリーズの外部入力を利用してサーボの動きでシャッターを操作してみることにしました。
このレリーズユニットがあれば、角度が変化するものをシャッター操作に置き換えることができます。
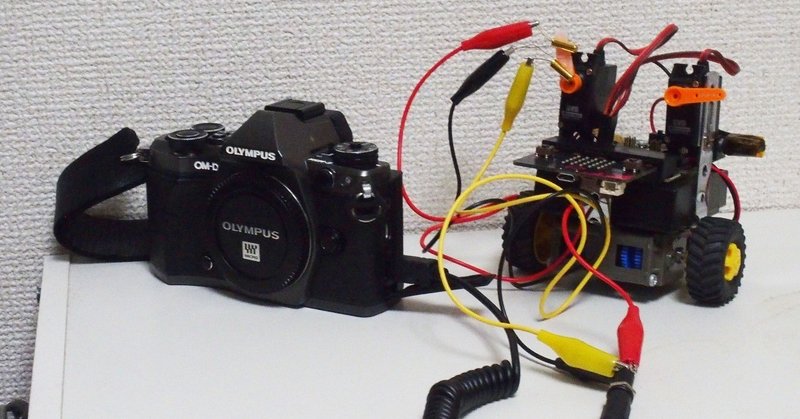
カメラへのコネクター部はエツミのリモートスイッチを利用しました。
この製品は、カメラ側のコネクターとケーブル部が、スイッチボックスと2.5mmのステレオプラグで接続するようにできているため、電子工作に応用しやすくなっています。

カメラへの入力方法が決まったので、次はレリーズをおこなうスイッチ部分の機構を作っていきます。いろいろなやり方がありますが、まずはもっとも簡単な方法として「傾斜スイッチ」を使ってみます。
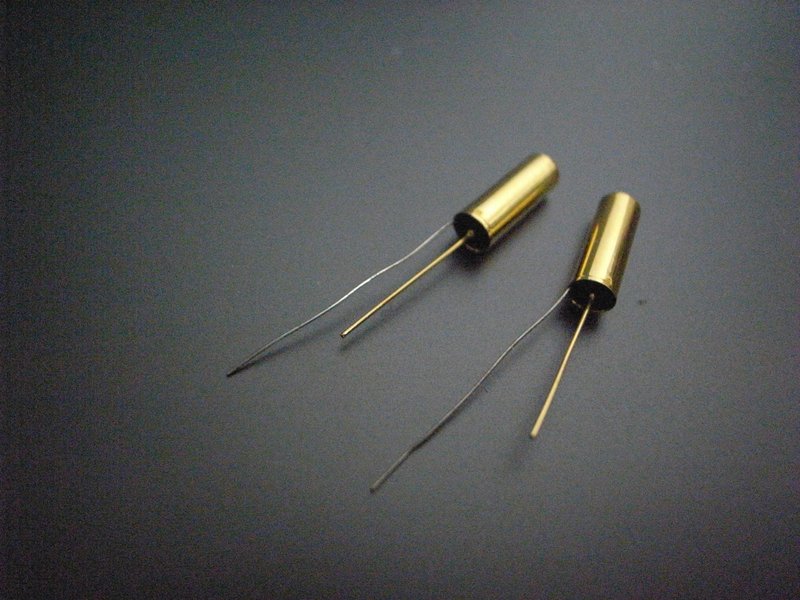
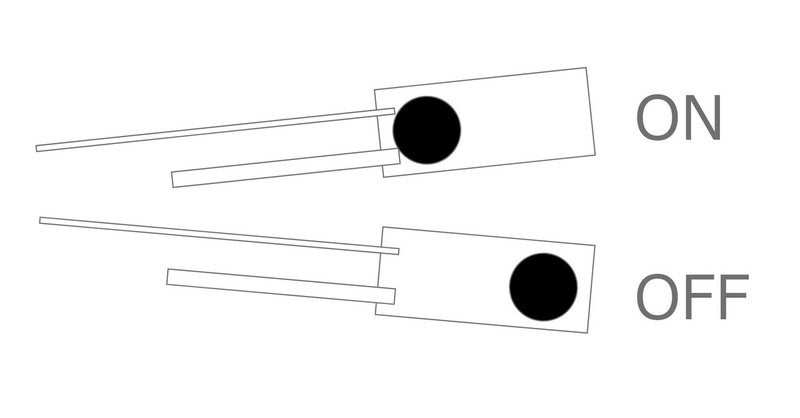
この部品の構造は単純で、中に金属のボールが入っていて、筒の傾きによって根元にある金属接点のON/OFFが切り替わることになります。
そのためにチャタリングといって、中に入っている金属のボールが振動して接点の状態が安定しません、今回の実験によってカメラ側がどのように反応するかを確認してみることにします。

Micro:bitのブロックコードはこのようにしてみました。いたってシンプルです。
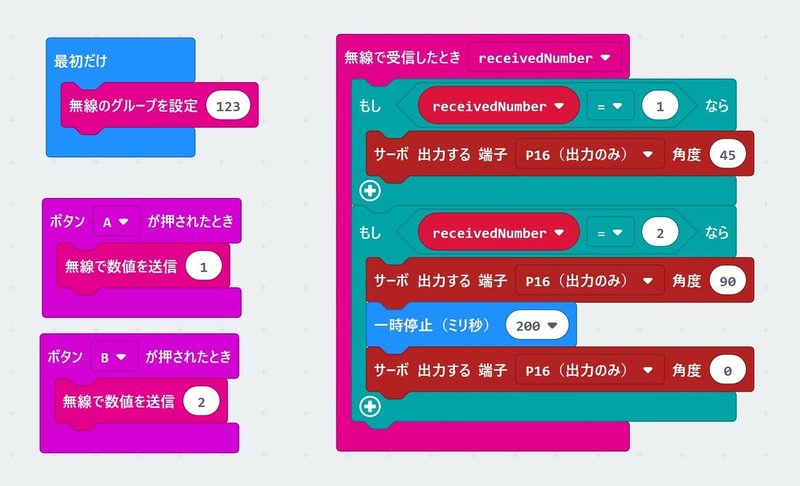
リモコン用のMicro:bitとサーボコントロール用のものを用意して通信をさせ、A(左)ボタンを押すと1stレリーズ(45度)、B(右)ボタンを押すと2ndレリーズ(90度)になった後でホームポジション(0度)になるようにしています。
リモコンの構成にしているのは、後で複雑な撮影トリガーを試してみるときにケーブルで繋がっていない方が自由度が高いからです。
では、さっそく実験です。

そしてこれが撮影結果になります。

まずは「大成功」でした。 心配していたチャタリングもなく、安定して動作し連続して撮影できました。
これで撮影できることが分かったので、次は送信側のアイデアを考えていけばさまざまな撮影実験を行うことができるようになります。
加速度センサーを使ってゼスチャーで撮影したり、さまざまなセンサーを組み合わせて自動撮影させることも可能です。
次回は、カメラを移動させる簡易的なドリー(カメラを乗せて動く装置)のプロトタイプを作ってみようと思います。
今回のレリーズユニットと組み合わせることで、ロボット的なより複雑な撮影ができるようにしていきます。
この記事が気に入ったらサポートをしてみませんか?