平成33(令和3)年のNゲージまとめ
今年は模型の購入が350両程になってしまいました。
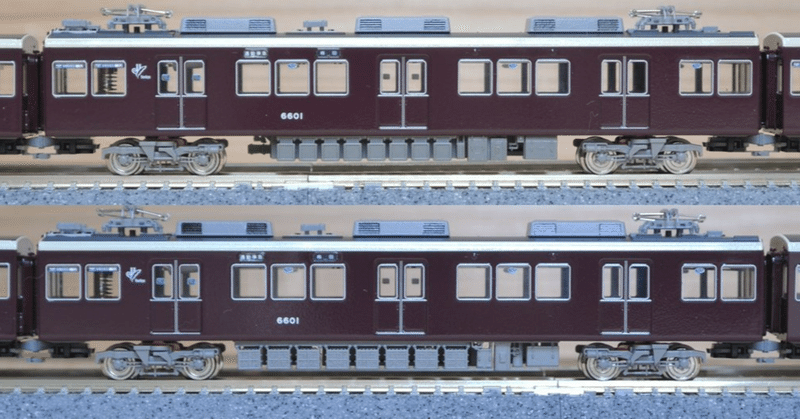
床下機器の更新もC#8315x8RとC#6001x8Rの2編成で実施。
見栄えが見違えるように良くなりました。
12月31日時点での保有車両数は2549両,281編成になりました。
すべて連結すると339,481mmになります。
発売遅延で来年に延びたものもあるので来年は2600両を超えます。
400mぐらいのレイアウトが欲しいですね。
200mあると大阪梅田から神戸三宮までのレイアウトが作れそうです。
https://