LiDARとARマーカーを使用した自動走行テスト@自社実験農場

トクイテンの森です。今回は先週農場で行ってきた移動ロボットのテストについてレポートします。
まずは宣伝です。以下の日程でオンライン会社説明会が開催されますので、是非ご応募ください。
日程:10月21日 (金) 08:00~08:50
申し込みページ
自律走行ロボットの方法
移動ロボットの自律移動は長年の研究成果があり、ロボット自身のセンサからのデータをもとに地図を作り、さらにその地図上のロボットの位置を推定するというSLAMという技術や目標地点までの適切な移動経路を計算する経路最適化技術などがオープンソースで公開されています。
我々の当面の目標としては、SLAMは使わずに予め定義した農場の畝と通路の地図とロボットの前方についているLiDAR(レーザーにより障害物の形状を距離マップとして与えるセンサー)を使用して、自律走行を試みます。その際にはロボットのタイヤの回転(オドメトリ)とARマーカーと呼ばれるマーカーを使ってロボットの位置を推定します。
ちなみに、LiDARセンサは自己位置推定には使っていませんが、このセンサを利用することで通路上に置き忘れた器具などがあっても安全に止まることができます。
ライントレースも考えましたが、地面は土で汚れるのと、ライン設置後に経路を柔軟に設定できないので今回は見送りました。
農場テストの様子
農場でのテストが以下のようになっています。すでにトマトが取り払われていますが、通路と畝は残してあります。畝の両端とその間の一定間隔にマーカーをつけてロボットの位置を補正しています。
マーカーは濡れることを想定してラミネートを施しています。
ビデオをみると一見うまくいっているように見えますが、精度や推定のチラツキなど問題点がいくつか見つかりました。
ARマーカーの問題
共同創業者の豊吉さんが以下のようなツイートを冗談半分でしたところ、大学院で学生時代を共にした産業技術総合研究所の尾形邦裕さんからリプライがあり、早速ご本人に連絡して相談に乗っていただくことになりました。
ARマーカーが収穫時期を迎えています pic.twitter.com/PN7EmTEtRv
— とよし (@toyoshi) October 9, 2022
マーカーの精度に問題があれば,いつでもご相談ください.
— Kunihiro_Ogata (@Gekkou_Mashu) October 9, 2022
従来のARマーカーより精度の良い,高精度マーカーを扱っておりますので.
尾形さんとのミーティングでは、尾形さんだけでなく産総研発ベンチャーでマーカーを専門に研究開発しているリーグソリューソンズ様の関係者にも参加していただき相談に乗っていただきました。
その中では、聞き齧っていたはずなのに重視せずに完全に忘れていた以下のような問題を指摘していただき、「食事の前には手を洗いましょう」と言われたような恥ずかしさがありました。
ARマーカーは正面の精度は落ちるので、角度をつけたほうが良い
角度が深くなると距離の精度が落ちて、方向の左右の区別が付かなくなり推定が不安定になる
マーカーはラミネートだけでなく固いプレートに貼り付けた方が良い
太陽光の反射には、ノングレアな紙やラミネートなどを使うのが良い
リーグソリューソンズの製品は全ての問題を克服している
リーグソリューソン社のマーカー技術
ミーティングに参加していただいたリーグソリューソン様は産総研発ベンチャーで既存のマーカーの欠点を補う技術を製品化しています。
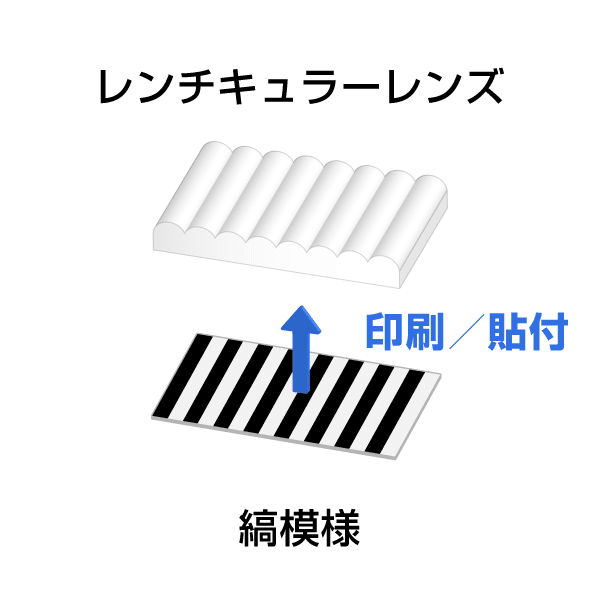
レティキュラーレンズを利用した仕組みにより正面での姿勢推定の誤差や距離の精度低下を防いでいるそうです。
まとめ
今回も事業の技術内容を公開することで思わぬところから相談相手が見つかり、不具合の解像度が高まりました。
まずは現在の手法を追求しますが、今後、自律移動の方式を含めてできるだけ現場環境に寄らずに簡便に設定でき、計算コストが安く、長期運用に耐えるバランスの良い方法を考えていきたいと思います。
おまけ
指摘を受けてマーカーの修正バージョンを作っている様子
今日もARマーカー作ってる。ARマーカーの作り方の基礎を教えてもらったので、このバージョンは明日雑に使う用。次はもっといいのができる予定。 pic.twitter.com/8okwcRgJxF
— とよし (@toyoshi) October 13, 2022
この記事が気に入ったらサポートをしてみませんか?