IMUによるモーションセンシング #6 〜バイアス誤差のキャリブレーションモデル〜

キャリブレーションモデルについて補足する.ここので議論は,ようするに加速度センサに限らず,ジャイロセンサでも地磁気センサでも,バイアス誤差は発生し,バイアスは感度の影響を受けるというお話で,キャリブレーションモデルも適切に選択しないと,正確に補正出来ないということを示す.単にセンサを用いるだけなら,今回のお話は気にならないかもしれないが,適切にキャリブレーションを行うことの大切さを理解していただけると嬉しい.
4章の後にこの話題を取り上げるべきであった.前回(5章)の話題から繋がりが悪くなってしまったことをお詫びする.
キャリブレーションモデルについてあらためて
4章
では,加速度センサのキャリブレーションについて述べた.これは,ジャイロセンサや地磁気センサにも共通する性質を持つので,ここで改めて述べておく,
以下の,$${\bm{a}}$$や$${\hat{\bm{a}}}$$は補正前の加速度ベクトル(計測信号)と,補正した加速度ベクトルだが,これをジャイロセンサに置き換えてもよい.地磁気センサも似ている.
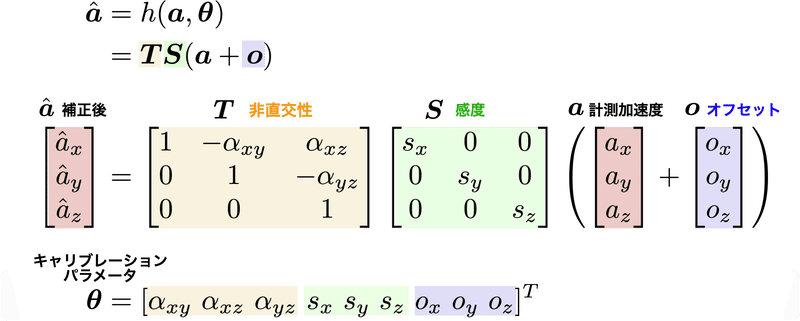
ここで,$${\bm{T}}$$は非直交性誤差,$${\bm{S}}$$は感度(ゲイン)で対角行列で表し,$${\bm{o}}$$はオフセットベクトルである.これらのキャリブレーションパラメータはベクトル$${\bm{\theta}}$$にまとめた.
温度特性など誤差要因は他にもあるが,キャリブレーションで補正を行う上で重要なものはこれらの3つと考えている.
キャリブレーションモデルの吟味
3つの要因の選択が正しいとしよう.そこで,ここで考えてみてほしい.$${\bm{T}}$$,$${\bm{S}}$$,$${\bm{o}}$$の順番はこれで良いのだろうか?
$${\bm{T}}$$は構造・幾何学的な要因で,電気的に出力された信号を最後に歪めると考え,これがオフセット$${\bm{o}}$$や感度$${\bm{S}}$$に影響を及ぼすとは考えにくいので,最後(式では最初に出現)に計算されるのは問題ないだろう.
VectorNavのINERTIAL NAVIGATION PRIMERで述べられているように
$$
\begin{aligned}
\boldsymbol{S}\boldsymbol{T}(\boldsymbol{a} + \boldsymbol{o})
\end{aligned}
$$
というモデルは考えにくい.
オフセットは感度の影響を受けるのか?
では,オフセットは感度の影響を受けるのか受けないのか?つまり
$$
\text{model 1:}\\
\begin{aligned}
\boldsymbol{T} \boldsymbol{S}(\boldsymbol{a} + \boldsymbol{o}) = \boldsymbol{T} \boldsymbol{S}\boldsymbol{a} + \boldsymbol{T} \boldsymbol{S}\boldsymbol{o}
\end{aligned}
$$
なのか
$$
\text{model 2:}\\
\begin{aligned}
\boldsymbol{T} (\boldsymbol{S}\boldsymbol{a} + \boldsymbol{o})
\end{aligned}
$$
なのかである.これについて学会で指摘を受け,今回,検証を行った次第である.
結論を述べると,幸い前者が正しい.オフセットが発生するは複数の要因があり,センサやAD変換に印加するリファレンス電圧などの影響を受ける.このため,非直交性誤差$${\bm{T}}$$を除いて考えると,$${\boldsymbol{S}\boldsymbol{a} + \boldsymbol{S}\boldsymbol{o}}$$と考えるのが自然である.
もし,昔のようにひずみゲージ型加速度センサを高精度なアンプ(歪アンプ)で計測するような場合を想定するなら,$${\boldsymbol{S}\boldsymbol{a} + \boldsymbol{o}}$$でよいだろう.これは信号を増幅するのは,ひずみゲージの信号に対して,歪アンプしかないからである.オフセットをブリッジ回路でゼロバランスするだけでことは足りた.
しかし,MEMS型センサを使う場合は,アンプやAD変換など,センサ内外に電気回路が複雑に組み込まれ,オフセットは感度$${\boldsymbol{S}}$$の影響を受ける.オフセット自体がいろいろなところで混入する.そして,結果それは感度の影響を受ける.
実際,2つのモデルでキャリブレーションを行い比較すると,キャリブレーションの精度(つじつまがどの程度あうか)は格段に異なる.なお,ここではキャリブレーションの違いがわかりやすい,200Gの加速度センサを使用している.
model1,すなわち,オフセットが感度に影響を受けるモデルでキャリブレーションした結果と,感度と独立に定まるmodel2を比較すると,
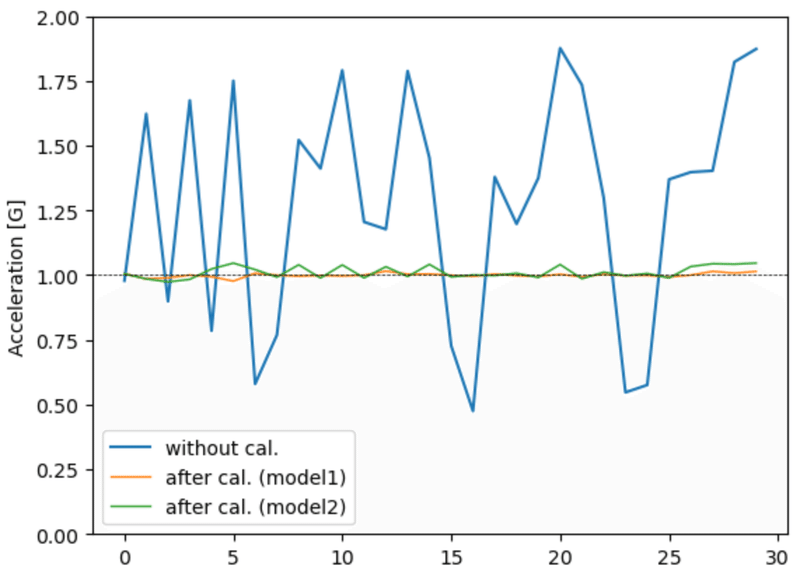
のようになる.この検証では,4章で述べたように,センサを30種類の姿勢変化を与えて,静止したセンサの加速度を計測し,ノルム(大きさ)を計算する.どの姿勢でも静止しているので,大きさは1Gになって欲しい.ここで横軸は30姿勢を示している.
青線はキャリブレーション前の加速度のノルム(大きさ)で,本来は,すべて大きさ1Gとなって欲しいところだが,200Gのセンサでは結構ひどい値を示す.キャリブレーションを行えば,model1でもmodel2でも1Gに近づき精度は向上しているが,スケールを変えて拡大すると,
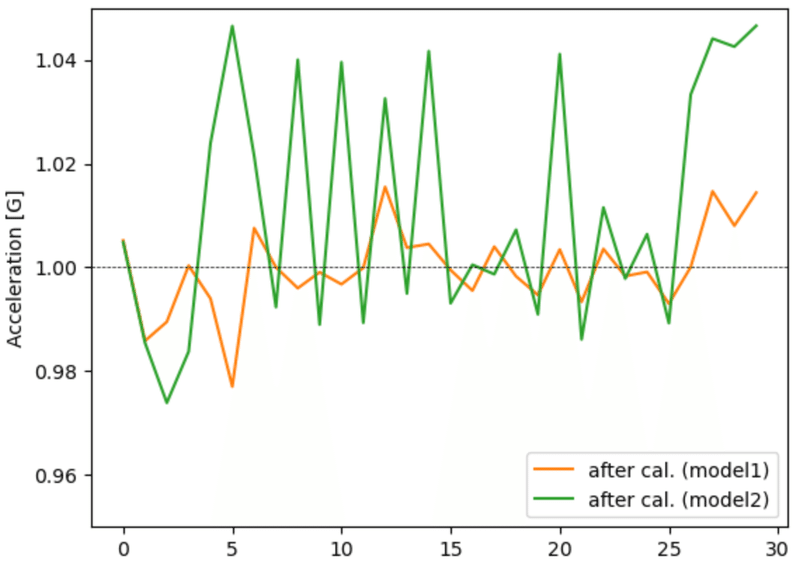
のようになる.model1すなわち,オフセットが感度に影響を及ぼすモデルのほうが,2〜3倍程度精度が異なり,model1 のフィッティングはよい結果を生む.
このことからも,オフセットは感度の影響を受けると考えるのが妥当だろう.
非直交性誤差の検証
model1のキャリブレーションを実行すると,非直交性誤差のパラメータはかなり1に近いが,キャリブレーションの精度にどの程度影響を及ぼしているのだろうか?
$${\bm{T}}$$を含まないmodel3
$$
\text{model 3:}\\
\begin{aligned}
\boldsymbol{S}(\boldsymbol{a} + \boldsymbol{o})
\end{aligned}
$$
との比較で,検証する.
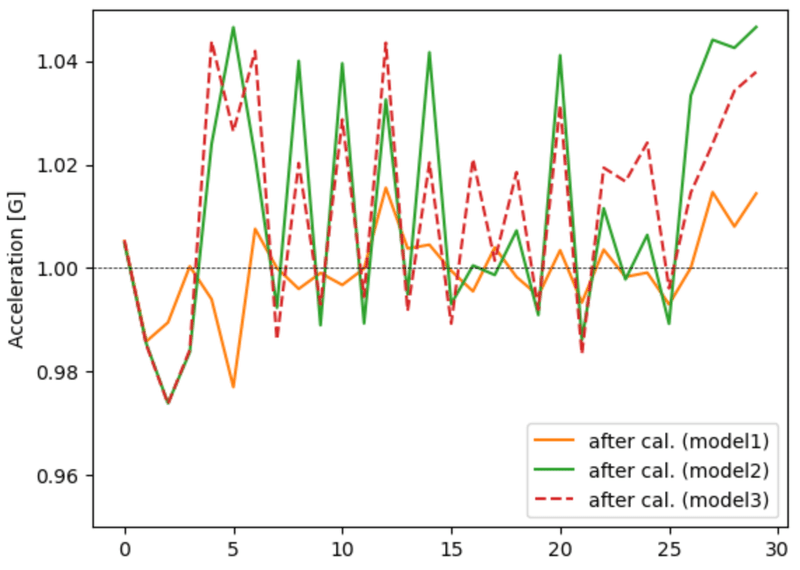
再構成誤差として,非直交性誤差を考慮しないmodel3(赤破線)で加速度のノルムを比較すると,model1(オレンジ),すなわち非直交性誤差を考慮したモデル
$$
\text{model 1:}\\
\begin{aligned}
\boldsymbol{T} \boldsymbol{S}(\boldsymbol{a} + \boldsymbol{o})
\end{aligned}
$$
のほうが精度は向上している.このことから,非直交性誤差$${\bm{T}}$$を考慮したほうが良いと考えている.
おわりに
キャリブレーション方法も重要だが,そもそもキャリブレーションモデルの選択は重要だ.単に加速度を計測するという場合も重要だが,ここから軌道計算などをする場合にはもちろんだ.
参考文献
D. Tedaldi, A. Pretto and E. Menegatti, “A Robust and Easy to Implement Method for IMU Calibration without External Equipments”, IEEE International Conference on Robotics & Automation (ICRA), 2014, pp.3042–3049.
太田,徳永,大平,センサ座標系におけるバイアス誤差を考慮したIMUによるスイング運動の軌道推定,日本機械学会 シンポジウム:スポーツ工学・ヒューマンダイナミクス2023(SHD2023)@名城大学,2023.11.10-12



【著作権・転載・免責について】
権利の帰属
本ホームページで提示しているソフトウェアならびにプログラムリストは,スポーツセンシング社の著作物であり,スポーツセンシング社に知的所有権がありますが,自由にご利用いただいて構いません.
本ページに掲載されている記事,ソフトウェア,プログラムなどに関する著作権および工業所有権については,株式会社スポーツセンシングに帰属するものです.非営利目的で行う研究用途に限り,無償での使用を許可します.
転載
本ページの内容の転載については非営利目的に限り,本ページの引用であることを明記したうえで,自由に行えるものとします.
免責
本ページで掲載されている内容は,特定の条件下についての内容である場合があります. ソフトウェアやプログラム等,本ページの内容を参照して研究などを行う場合には,その点を十分に踏まえた上で,自己責任でご利用ください.また,本ページの掲載内容によって生じた一切の損害については,株式会社スポーツセンシングおよび著者はその責を負わないものとします.
【解析・受託開発について】
スポーツセンシングでは,豊富な知見を持つ,研究者や各種エンジニアが研究・開発のお手伝いをしております.研究・開発でお困りの方は,ぜひスポーツセンシングにご相談ください.
【例】
・データ解析の代行
・受託開発
(ハードウェア、組込みソフトウェア、PC/モバイルアプリ)
・測定システム構築に関するコンサルティング など
その他,幅広い分野をカバーしておりますので,まずはお気軽にお問い合わせください.
【データの計測について】
スポーツセンシング社のスタジオで,フォースプレートやモーションキャプチャを利用した計測も行えます.出力されるデータと,ここで示したプログラム(入力データの取り込み関数を少々改変する必要があるが)で,同様な解析を行えますので,まずはお気軽にお問い合わせください.