「ロボットが人間のユーザーを再識別し、追跡することを可能にする新しいモデル」

Day13
今日はロボットを構成する要素の1技術ですね。ソフトウェア側の話。クリスマスイブだけど、何も気にせずに投稿しますw 再識別し、という点が新しいのかな・・・?何となくこういう関連技術があるのは知っていますが世界の潮流をきちんと追えていないので、これから適宜勉強していきたいと思います。(って言っても、一ヶ月サボるとついて行けないことがあるくらいすぐ変わるのんですよね)
ただ、間違いなく言えるのはこういった認識技術はすべての活動の基礎となる技術だからとても重要な技術の一つです。
最近の年に、ロボット工学者やコンピュータ科学者たちは、現実世界でのロボットと人間との相互作用を改善できる様々な新しい計算ツールを導入しました。これらのツールの最終目標は、彼らが支援するユーザーに対してロボットをより反応的で調和されたものにすることであり、これにより広範な採用を促進することができます。
イタリアのレオナルド・ラボとイタリア工科大学(IIT)の研究者たちは最近、特定のユーザーを認識し、与えられた環境内でそれに続くロボットを可能にする新しい計算フレームワークを紹介しました。このフレームワークは、*2023 IEEE国際高度ロボット工学およびその社会的影響会議(ARSO)*の一部として発表された論文で紹介され、周囲のユーザーを再識別し、ユーザーによって行われた手のジェスチャーに応じて特定の行動を実行することを可能にします。
フェデリコ・ロッロ氏などの研究者たちは、「私たちは、関係者を我々の研究室に引き付けるための画期的なデモンストレーションを作成することを目指しました」と述べています。彼らによる最近の研究の主な目的は、RGBカメラによって記録された画像内で特定のターゲットを認識することができる再識別モデルを作成することでした。RGBカメラはロボティクス分野で最も使用されているセンサーの一つであり、既存のロボットシステムに統合するのが非常に簡単です。
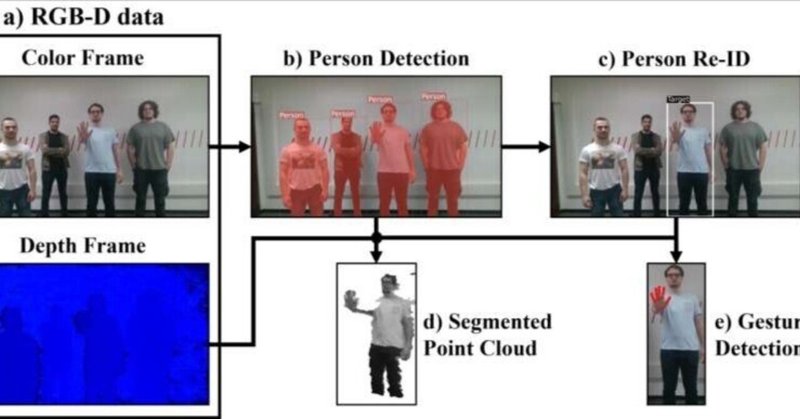
ロッロ氏は、「私たちが開発した再識別モジュールには、キャリブレーションステップと再識別ステップの2つの連続したステップが含まれています」と説明しました。
「キャリブレーションステップ中に、ターゲットとなる人はロボットの前でランダムに動くように要求されます。このフェーズでは、ロボットはニューラルネットワークを利用して人を検出し、その外見をネットワークの埋め込み(人の特徴を表す抽象的なベクトルと考えてください)の形で学習します。これらの埋め込みは、ターゲットを表す統計的モデルを作成するために使用されます。」
その処理の第二段階では、研究者によって作成されたモジュールは、ターゲットが自然に周囲で動いている間にそれらを再識別します。このフレームワークは、1つ以上のRGBカメラによって取得された画像を分析し、これらの画像内の人々を検出し、その特徴を計算し、キャリブレーションフェーズ中に作成されたターゲットユーザーのモデルに概説された特徴と比較することによってこれを達成します。
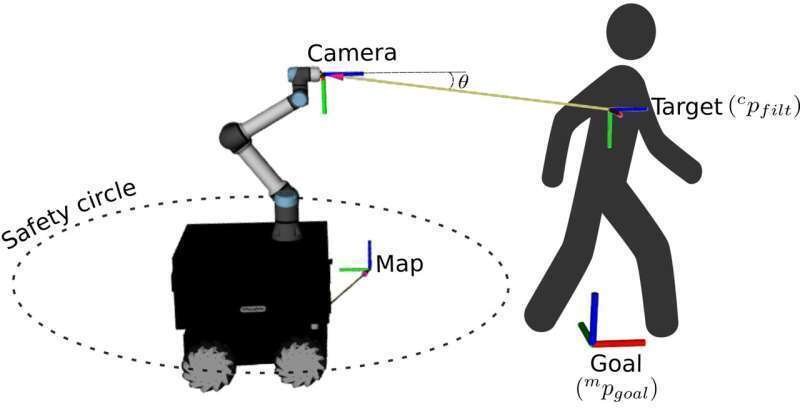
「特定の特徴がモデルと統計的に一致する場合、それらの特徴を持つ人はターゲットとして選択されます」とロッロ氏は言います。その後、この情報はローカリゼーションモジュールに送信され、ターゲットユーザーの3D位置を計算し、ロボットが彼/彼女に向かって動くための速度指令を送信します。さらに、このアプリケーションにはジェスチャー検出モジュールが含まれています。
ロッロ氏と彼の同僚によって作成されたジェスチャー検出モデルは、ターゲットユーザーの特定の手のジェスチャーを検出し、これらのジェスチャーに合わせたコマンドをロボットに送信します。たとえば、ユーザーがロボットの視野の前に開いた手を置くと、停止コマンドがトリガーされ、ロボットに停止するよう指示します。逆に、ユーザーが閉じた手を提示すると、ロボットは再び動作を開始します。
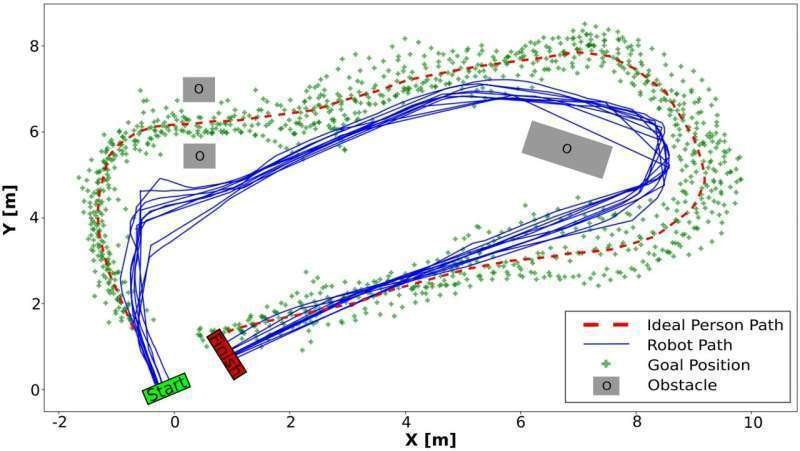
これまでのところ、研究者たちはRobotnik RB-Kairos+ロボットを使用して一連の実験でフレームワークをテストしました。これは、主に倉庫や製造現場などの産業環境で導入されることを目的としたモバイルロボットマニピュレーターです。
ロッロ氏は、「再識別モジュールはテスト中に顕著な堅牢性を示しました。これは、混雑したエリアでも同様です」と述べています。「この堅牢な振る舞いは、さまざまな実用的な応用を開放します。たとえば、産業環境での重量物の移動、協力的または産業環境の異なるステーションへのロボットの誘導、または高齢者の家庭内での荷物の移動の支援に利用できます。」
このチームの研究者によって開発された新しい再識別およびジェスチャー検出フレームワークは、人間を追跡し、アイテムを自動的に輸送する必要がある様々な実世界のシナリオでまもなく適用およびさらにテストされる可能性があります。ただし、大規模に展開する前に、ロッロ氏と彼の同僚は、初期の実験中に特定されたモデルのいくつかの制限を克服する予定です。
ロッロ氏は、「キャリブレーションフェーズで取得された統計的モデルは、再識別中に一定のままであるという顕著な制限があります」と付け加えました。
「これは、ターゲットが異なる服を着るなどして外見を変えると、アルゴリズムは適応できず、再キャリブレーションが必要になることを意味します。さらに、ニューラルネットワーク自体をターゲットを認識するように適応させる新しいアプローチを探求することに関心が表明されています。これにより、ターゲットモデルとRGB画像から抽出された特徴の間の統計的一致が向上し、より適応性の高い柔軟なシステムが提供される可能性があります。」
詳細情報: Federico Rollo et al, FollowMe: a Robust Person Following Framework Based on Visual Re-Identification and Gestures, 2023 IEEE国際高度ロボット工学およびその社会的影響会議(ARSO) (2023). DOI: 10.1109/ARSO56563.2023.10187536. arXivで:DOI: 10.48550/arxiv.2311.12992
雑誌情報: arXiv
© 2023 Science X Network
ここから先は
¥ 500
この記事が気に入ったらサポートをしてみませんか?