横回転の鎌について

どうも、ふぁんたすてぃっくふぉー/大同大学OBのトンチャンです。
自身初のアドベントカレンダーに載せる記事ということで、改めて自己紹介を…
学部2年(2013年)の時にロボ研に入り下剋上酒鶏さんの遠征に同行し始めて、その頃は虎牛(コウシ)という黄色クランクアーム小型機を酒鶏さんから借りて参加していました。その際にdays先生の水色上下横回転に感銘を受け、初の自作機体として横回転を作りどんどんのめり込んでいきました。

そこから今まで色々な機体を作ってきましたが、今回は自分の初製作機体である横回転について、さらにその中でも最重要な鎌の形状について語ってみようかと思います。
(※あくまで個人的知見として見て頂けると幸いです。)
【鎌の形状】
横回転機体を作る上で一番重要と言っても過言ではないのが鎌の形状です。1回転目で噛むのと2回転目で噛むのではラグがすでに倍ですから、その間は相手に隙を見せることになります。他の横回転ユーザーの鎌を見てみると凹凸が沢山ついている印象だったので、どういう意味があるのか気になって、始めた当時は色んな形状を試しました。
その結果をまとめてみます。
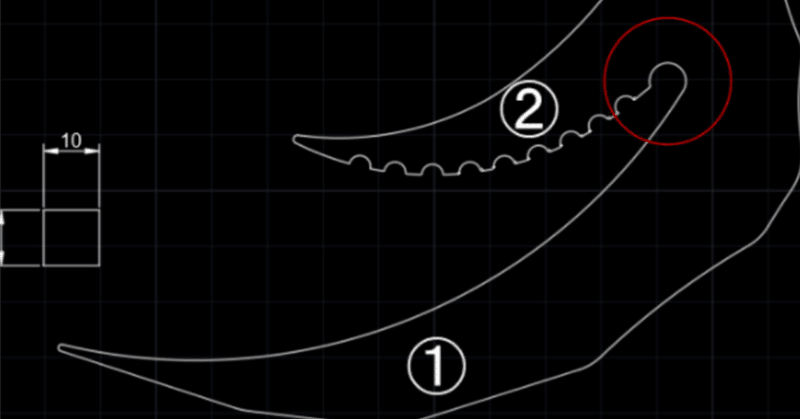
入口は広くして、谷部分(①と②間の赤丸部)は狭くすれば、対象物が谷に入りやすく噛みやすくなる。

そもそも、鎌を回してロッドなどの角物が回る原理は何でしょうか?
図は自分が設計した鎌です。鎌の左側に角10x10の角パイプに見立てた四角があります。
この鎌を攻撃方向(青矢印方向)に回してみます。

やがて対象物が谷部分(①と②間の赤丸部)に到達したとします。

すると今度は黄色丸部で角物のカドが突っ張り、鎌に対して角物が空転しなくなり一緒に回るわけです。これが、鎌が角物を回す原理です。
となれば、①と②の入口が広いほうが角物を狙いやすくて良いのは想像でわかりますが、谷部分(①と②間の赤丸部)は狭くすれば、細い角物であっても①と②で挟み込んで回すことができるわけです。
ロッド機のロッド部分は角6x8より大きいくらいでないと強度が確保できないため、角5×5〜角20×20を噛めるように設計すると良いと思います。
鎌の上段のみに凹凸が有ればロッドなどの角物は噛むまで時短になる。

先ほどは、回していたらたまたま谷部分に角物が入った体で話しましたが、今度は②に角物が接触して鎌に入る場合を考えてみましょう。
同じく青矢印方向に回してみます。
この図だけで考えれば「黄色丸で角物引っかかって谷部分にスムーズに入っていきにくいじゃん」と思ってしまいます。
しかしこう見方を変えるとまた考えが変わってきます。
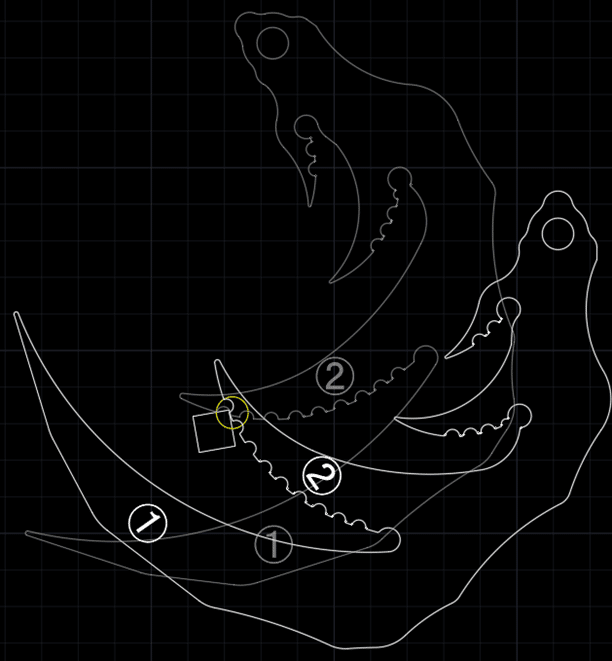
角物を固定視点として、鎌が角物のカド(黄色丸)を中心に時計回り(攻撃方向)に回るとします。
今度はこの状態を、鎌を固定視点として見てみます。

すると、②につけた凹凸に角物のカドが引っかかって、角物が鎌に沿って転がるように移動していきます。
つまり、回し続ければ①と②の谷部分に角物を半強制的に誘導することができるようになります。
「①と②の谷部分に角物を滑りこませる」という意味では凹凸が無いほうがスムーズかもしれませんが、①と②の谷部分に角物が到達しても角物のカドを滑らせず、しっかり引っかからせて鎌と一緒に回すということができなければなりません。
ですので、①と②の谷部分は狭くするかつ、②の刃(上の刃)には凹凸は必須と考えています。
では、今度は別のパターンを考えてみましょう。

今度は①の刃(下の刃)に凹凸をつけてみました。
この状態でさっきと同じ考え方で攻撃方向に回して、鎌を固定視点として見てみます。
するとどうでしょう。今度は鎌の①と②の谷部分に対して逃げていく方向に角物が転がっていきます。
つまり、角物を噛むまで時間がかかる、あるいは噛みにくくなってしまいます。
ですが、①につける凹凸の形状を工夫することでこれは解消できることもあります。
ここまでデメリットばかり言ってきましたが、もちろんメリットもあります。

図のように①と②の谷部分までしっかり嚙み込められれば、逆回転(攻撃方向と反回転)させても、黄色丸で支持するため簡単には角物は抜けないので逃げられにくくなります。
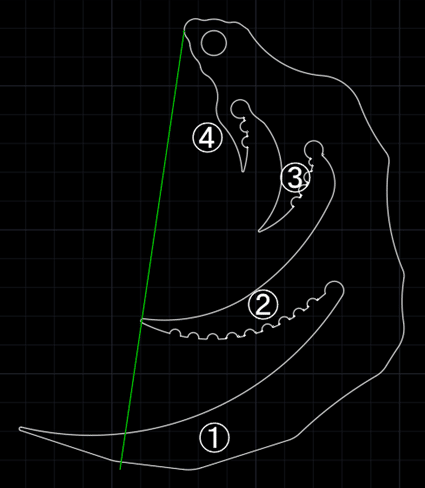
①②の刃は必須だが③以降もできる限り増やすとチャンス増加につながる。
単純に攻撃可能範囲が増えるのでチャンス増加につながります。


赤線が攻撃可能範囲、青線が攻撃不可能範囲です。
ロット機を使っている相手からすれば、攻撃範囲の広い鎌を適当にぶん回しながら近づいてくるだけで恐ろしいものです。
かわロボは操縦者が居てかつフィールドも一定でない場合が多い性質上、相手が焦って操縦するだけでも有利になります。
仮に③の刃を無くして①②④のみとしても攻撃範囲は変わりませんが、③の谷があることでより早くラグなく角物をつかみに行けます。なので、私はなるべく等間隔で刃をつけるようにしています。
①の刃を他の刃より飛び出させることでフルクロス対策につなげる。
近年、フルクロスと呼ばれる機体全体を覆ってしまうマントのようなものがありますが、①の刃を他の刃より飛び出させることでフルクロスの地面すれすれのところを狙うことができます。

右図の赤線がフルクロスとして見ます。この鎌の場合、もう少し飛び出させてもいいかもしれませんね。
フルクロスが無い機体が相手だとしても足あたりを直撃できるので良いと思います。
②③④の刃が①の刃よりも長い場合、②③④の刃が足の側板に先に当たってしまい、①の刃が足に届かなくなります。
最近、足が大きい機体が増えてきています。それに伴い足ユニット周辺の隙間も大きくなっていますので…
まあ、サイズ関わらずかわロボ共通の弱点だと思いますので、そこを狙っていくのはアリだと思っています。
回転半径をなるべく大きく、かつなるべく軽く作ると操作が楽になる。
前述したとおり、回転半径を大きくとることで攻撃可能範囲が増えるのでチャンス増加につながります。
しかし最近では、鎌の攻撃ユニットごと上下動させる「上下動横回転機」が流行っていますよね。それに伴って気を付けるべき点が鎌本体の重量増加です。
鎌を上下させる以上、重心位置が変わる問題が発生します。
重心位置が変わると走行させるときの感覚が変化したり、鎌が重いことで旋回反応速度が低下(モーメント増大)したりするので、なるべく旋回中心から離れた部品(今回は鎌)はなるべく軽く作って重心を安定させてやると操縦しやすくなります。
上図が半径150㎜で52g、下図が半径200㎜で92gでした(本当か?)


なので、それぞれコンセプトに合わせた回転半径にするのがベストだと思います。
まあ、横回転の鎌形状の話はこのくらいでしょうか。
その他にも
上下可動
カウンターアームの剛性
カウンターアームの展開ロック
カウンターアームの位置
カウンターウェイト
鎌2枚目の固定
鎌の回転方向
アーム回転速度
モーター個数
戦い方
など要素がまだまだありますが、気が向いたら書きたいと思います。
以上、トンチャンでした。
ではまた~
この記事が気に入ったらサポートをしてみませんか?