観測ロケットMOMO V0からV1の話

観測ロケットMOMOは大きなアップデート(JAXA用語で言うところの高度化)を行った。公式の説明のみではいまいち掴み切れない部分を掘り下げる。
ただ筆者の個人的感想は「テレメトリが公開されていないのでわらない」に尽きる。しかしそれではあまりに味気ないので肉付けして記したい。
IST社が公表しているMOMO v1のアップデート内容
発表内容についてはインターステラテクノロジズ社(IST社)による記事、あるいは大塚実氏の記事など、信頼できる筋を参照されたい。
本記事は主にIST社が公開した以下の動画内容に沿っている。かもしれない。
エンジン推力
12kNから14kNへ増強したと発表している。
ロケットエンジンの大幅な推力向上にはいくつものアプローチがあるがが、大別して、推進剤流量の向上、燃焼効率の向上がある。
ガス押しサイクルエンジンの推力増強にはインジェクタや燃焼室の改良による燃焼効率の向上が考えられるが、IST社はそのような発表を行っていない。燃焼運転時間はv0では120秒としていたがv1では119秒と変化している点から推力増強(単位時間当たりの流量増加)を推測することもできるが、MOMO-F3の実績ではT+116.5秒程度から燃焼室圧の低下が顕著であり、この実績に寄せた修正とみることもできる。また燃焼室圧の向上や流量増加の為に推進剤タンク加圧ガス系統を増強する手も考えられるが、MOMO-F6ではナレーション(1:08:06)にて「ヘリウム圧力25MPa以上」とアナウンスしており、これはMOMO-F5のT-20秒時点での値である27.0MPaと矛盾がないため、この系統の抜本的変更は行われていないと考えられる。
燃焼効率の向上を目指した結果、エンジン運転中の燃焼室圧が向上すれば推力が向上するが、テレメトリが公開されていない以上、その証拠は明確ではない。また打上映像から推力が大きく向上したと伺う事はできない。
そもそも論として、計算すれば明瞭になる事であるが、MOMO5以前のコンフィグ、即ち離床質量1150kgのエンジン推力12kNでは動画で撮影されたような上昇加速度を得られないし、到達高度は(非常にエンジン性能を高く見積もったシミュレーションで)40km少々に留まる。ガチ勢の方々は解りきっていたいた事だろうが、いまだにwebを含めたメディア上、アナリスト、またはジャーナルや論文で触れられていないようなので、素人の私がここに記しておく。MOMO v0用エンジンであるPT12k"たんぽぽ"は経産省委託開発エンジンを使うという建付けであるが、その時点で既に"改良"を施しており、14kN程度を発揮していた。v1に際してエンジンの再設計を行ったのを機に14kNを公称値として改めたと考えている。言うまでもないが私見である。
エンジンノズルカバーの焼損
実フライトと長秒燃焼試験でエンジンカバーの様子が異なる。
下は長秒燃焼試験動画。
下はMOMO-F7の中継動画(2:45:46)
MOMOの新型エンジンは地上気圧に最適化されたノズルのため、上昇して周辺気圧が低下すると相対的に膨張不足となり、ノズルから出た排気が前方に回り込む現象が起こる。そのためにノズルカバーに熱が加わり、変形したものと考えられる。
公式からこの現象が異常であるという発表はない。
このことからノズルカバーは地上運用時のノズル保護が目的であり、打上運用時の変形は仕様上許容されると考えられる。
PT12kで用いられていたグラファイトノズルは入手性や価格の面から現実的と考えられたのだろうが、実際に運用するうえでは品質保証と品質管理の面で改善が必要であり、その答えとしてスロート部の材質変更と、地上運用時用のノズルカバーの設置が採られたのだろう。
制御・計装等の電気電子系
テレメトリ等の材料がないのでわからない。
セミモノコック構造
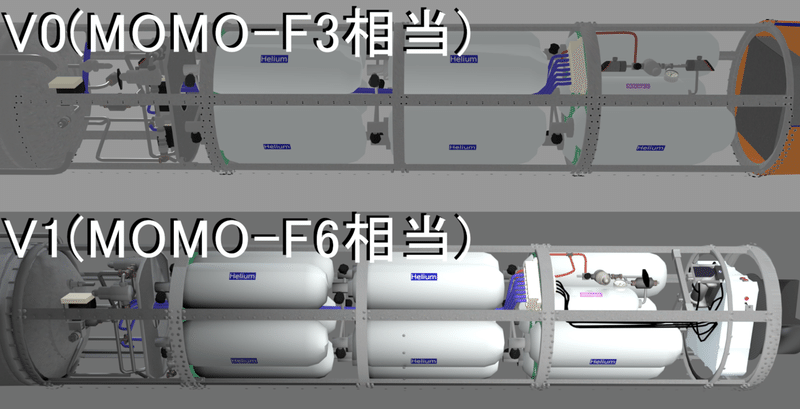
フェアリングの"割り"を改善することで作業性を向上させたととらえれば、さほど大きく外れてはいないだろう。
v0では加圧ガス部のフェアリングが3つの横材で中支えされる形であったが、v1では前部に1つ増えた。MOMO初号機では燃料タンク直上に加圧ガス制御バルブ系が立体的に配置されていたが、これがモジュール化され、所要体積が大きく減少した。そのためこの部分を切り詰めている。また燃料タンクと酸化剤タンクの間も数cm切り詰めているように見える。これらの変更でねん出した長さを前部に寄せ、空間を設ける形の変更を行ったと考えられる。この最前部にはアビオニクスを搭載している。アビオニクスがノーズコーン内からヘリウムタンク上へ移動した結果、ノーズコーン内のペイロード搭載空間は当初計画により近い形になったと考えられる。
内部装置(特にタンク間部)へのアクセス性
エタノールタンクと液体酸素タンクの間はセミモノコック構造であり、アルミ縦材とCFRPフェアリングで構成されている。内部には燃料配管、液体酸素タンクベント弁や水位計・圧力計、および計装類が収納されている。またここを経由してエンジン前部分の燃料弁に駆動圧を窒素ガス管や信号ケーブルが通っており、これらを保護するシステムトンネルが液体酸素タンクの外を通る。
v0ではこれらの外装がフェアリングの孔を通じて配置されていたため、フェアリングを閉じてから取り付ける必要があり、また外装を装着後はタンク間部にアクセスできない構造であった。
v1では外装の取り付け位置をセミモノコック縦材の接続部に設けることで、フェアリングの開け閉めを行う作業順序の自由度が増したと共に、フェアリングの孔が減少した。
ペイロードへのアクセス性
観測ロケットMOMOのペイロード搭載は様々な方法が試されてきた。ノーズコーン内アビオニクスコンテナ横に九州工科大学インフラサウンドセンサ観測装置を乗せるところから始まり、ヘリウムタンクの隙間にぬいぐるみ(ひふみろ君)やコーヒー豆(サザコーヒーパナマゲイシャ)を詰め込んだり、セミモノコック縦材の裏にハンバーグ(とろけるハンバーグ)を仕込んだりといった、"ちゃんとしたロケット"では考えられないような方法が試されてきた。
これらの方法は飛行安全に支障しておらず、問題ないと言えば問題ないのだが、管理上面倒な事柄ではあった。v1ではヘリウムガスタンク部の外周側に定型のペイロード搭載部が設けられた。
v1「TENGAロケット」ではペイロード放出機構が設けられた。この放出機構は「ペイターズドリーム MOMO 4号機」で試された紙ヒコーキ放出機構の後継的な装置であり、放出物を格納するシリンダーの内径を拡大した点が大きく異なるものの、大まかな動作や各アセンブリの配置は概ね継承しているように見える。
この機構の搭載位置こそ似ているが、「ペイターズドリーム MOMO 4号機」では窒素ガスタンクとヘリウムガスタンクの間にねじ込むように設置されていたのに対し、「TENGAロケット」ではより広い空間内に設置されているように見える。機体組立時の施工難度が下がるのみならず、組み立て工程とのスケジュール的な依存関係が低減するであろう。よくわからないが。
まとめ?
文中ではわからないわからないとさんざん騒いだが、そもそも詳細データを公開しているプロジェクトは非常にレアである。
先進国であるUSAとて、アポロ計画に関しては一時ソースにあたる情報を非常に多く公開しているが、昨今の商業打上ブームに際しては当たり障りのない程度のグラフや音声通信ログがせいぜいだ。より詳細な情報は取引先にのみ開示される。
2021年8月12日インドのISRO GSLV-MK2の打上運用公式生放送にて概略テレメトリを表示した管制室のディスプレイが写された。のちの行われた公式発表では上段エンジンの不点火と説明された反面、映像ではエンジン運転が行われているように表現された。一方で高度とみられるグラフは異常に低下しており、総体としては事実が公開されているとみて良いだろう。
最近では2021年8月28日Astra社のAstra Rocket3.3打上運用公式生放送にて高度と速度のテレメトリを公開する試みが行われ、実際の飛行の異常さ相応の異常な打ち上げ相応の異常な値を示しており、信ぴょう性が高い。上手く動いていないと判断するや、その表示を消してしまったが。
アルテミス計画の一部を占めるHuman Landing System(HLS)関しても、企業側が提示した詳細な計画に関する情報は公に見当たらない。事実が書かれた公文書が公開され、あるいは論文化されるのは企業秘が解かれた後になろうから、当然でもある。
観測ロケットMOMO v1 「TENGAロケット」においてはテレメトリに基く数値とみられる高度・速度情報が公式中継にのせられた。高度情報は数値の動きから、精度の高い加速度センサの値からではなく、より低精度の衛星測位システムの値から求めた値を表示していると考えられる。速度情報には大幅な遅延があり、この衛星測位情報から更にフィルターを噛ませた値だろう。
2019年2月22日、日本の「はやぶさ2」の「イトカワ」着陸運用時は、日本放送協会(NHK)がテレメトリに基づくと偽ってベイク済み(事前に制作した)のCGを放映した。この事件は「はやぶさ2」降下操作の一時停止がCGに反映されなかった事から明らかになった。この放送で使われた映像はNHKとJAXAが共同研究を行った8K(7,680*4,320ピクセル)映像システム「SHVはやぶさ2可視化システム」に基づくものと考えられる。テレメトリデータに基づく映像をリアルタイムで生成するシステムという触れ込みであったが、実際にはタッチダウン予定時刻を基準にしたイメージCGであり、有体に言えばフェイク映像であった。
そんな状況であるから、宇宙コミットメントの高い記者の署名付き記事でなければまずデタラメと考えてよい昨今だ。情報量に限って言えば、SNSユーザーによる"覗き見"の方が優秀まである。
米国や東欧の某国では、大学生レベルの知識があれば構想段階から物理的に破綻している破綻していると看破できる程度のお粗末なプロジェクトが数億円、数十億円を集め、事も有ろうに行政まで巻き込んで行われている現実もある。
宇宙業界というものは概して上のような感じなので、詳細なテレメトリが公開されていない程度でガタガタ騒ぐのは実態から大きく外れた価値観とも言える(おかげで宇宙産業に着目している投資家は、あてになるデータが足りずに難儀している様子)。
一方で同じ輸送機械業である自動車産業界では第三者機関やメディアによる一応中立的な検証が行われており、ある程度その実態を掴みやすい。その点、MOMO-F1からF5までの詳細テレメトリを公開している観測ロケットMOMOプロジェクトは民主的であると評せるだろう。
この記事が気に入ったらサポートをしてみませんか?