myCobotを自作してみた話

先日、中国のロボットベンチャー「Elephant Robotics」が、安価な6軸ロボットアーム「myCobot」の販売を開始し、特に日本のM5Stackユーザー、コミュニティを中心に大きな賑わいをみせている。
12月現在での販売はまだ先行的なものらしく、少量しか取り扱っていない。正式販売は2月以降らしい。また、日本販売に向けてはスイッチサイエンスが調整中とのこと。
myCobotの価格は6万円弱で、6軸ロボットアームとしては超破格。かの有名なブロガー「からあげ」さんも絶賛していた。
そんな中、もちろん私も「欲しいな」「買おうかな」と思っていたのだが、「Makerなら6軸アームくらい自分で作ればよいのでは?」という想いが、自身の頭をよぎった。「これは、作るっきゃないな!」と。
なんとなく、1週間くらいで出来そうな気がしたので、勢いで作ってみることにした。今回、部品の新規購入はしない。自宅にあるものだけでやってみる。思い立ったのが2020年12月15日、ラピッドプロトタイピングのスタートである。
仕様
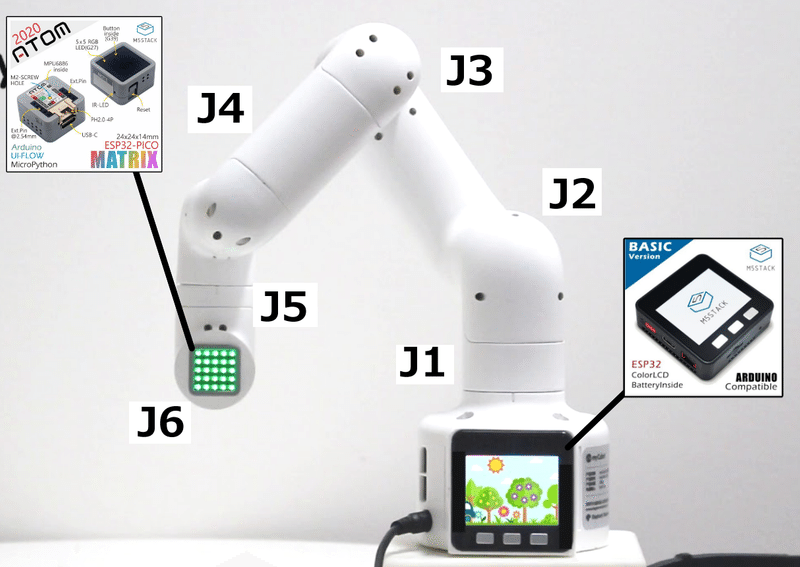
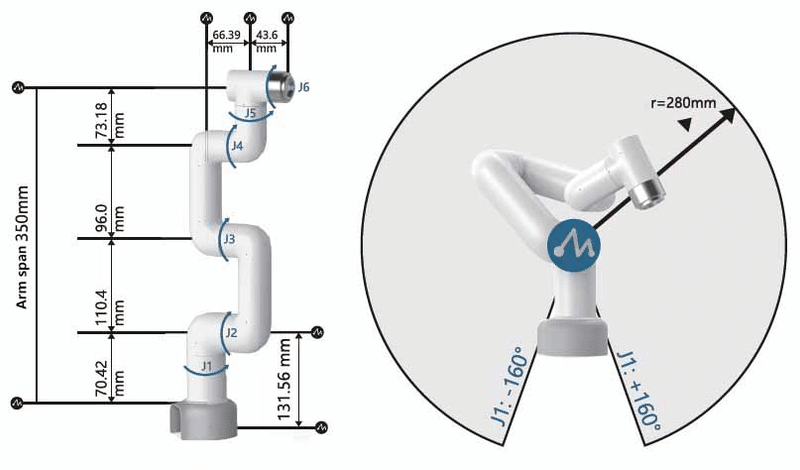
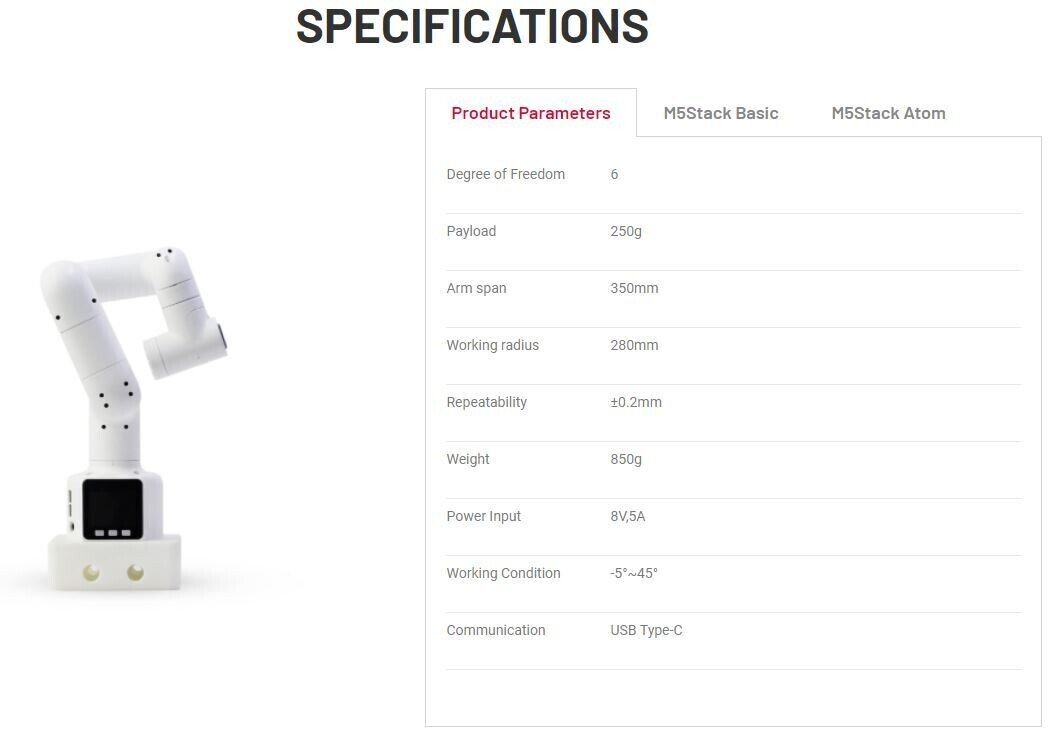
外観を見る限り、myCobotの構成はとてもシンプルで、ベースのM5Stackでメインの制御を行い、ヘッドのM5Atomで接触検知等行っていることが容易に想像できる。あとは各関節のモータが6つあるだけ。しかしながら、内機の情報まで公開されてない為、想像と作りやすさで決めていく。
6軸もあるからには、それはきっとPWMなわけがなく、シリアルサーボに違いない。ただし、シリアルサーボはそこそこ高いのが難点(自作しているMakerも多いけどね)。
例えば、有名どころだとDYNAMIXEL。安価なものでも5,000円~。6軸だと単純計算で3万円~となり、制御ボードを加えると4万円以上はかかるだろう。
Futaba製品も大差はない。1万円弱が相場。
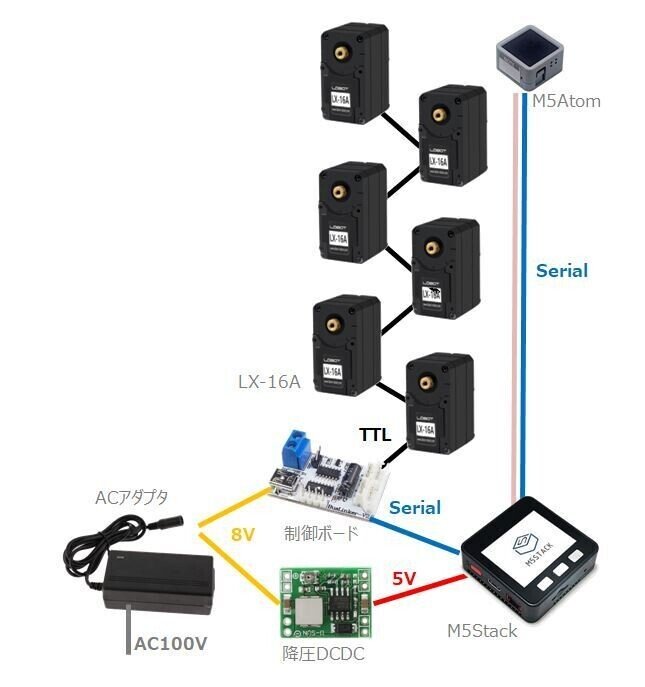
そこで候補に挙がるのが中華サーボである。近頃私が愛用しているのが、このHiwonder「LX-16A」。もちろんAliExpressでも購入可能だ。
その価格は、シリアルサーボとしては破格の2,000円強。制御ボード込みでも6軸合わせて15,000円程度で成り立つ。トルクは17 kg / cmでフルメタルギア。きちんと位置、温度、電圧のF/Bがあるので、基本的な性能も申し分ないだろう。これは自宅で20個くらい所有していたので運が良かった。
簡単に構成を書くとしたら、下図のような形だろうか。電源はサーボに合わせて8V。M5にはDCDCで5Vへ降圧してから入力する。
設計
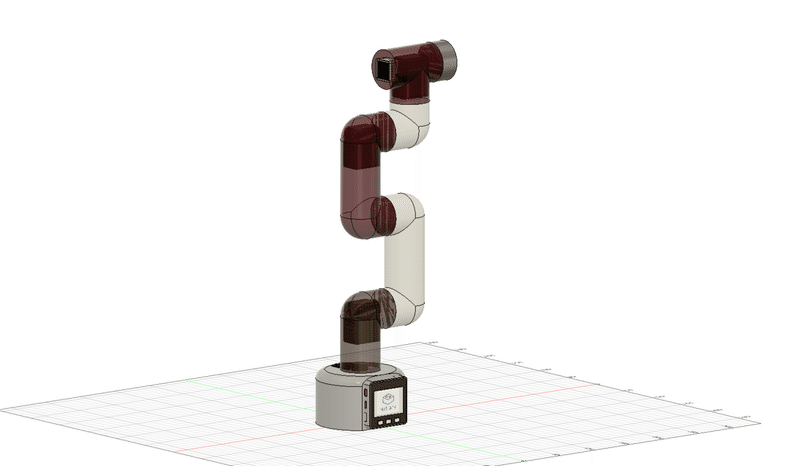
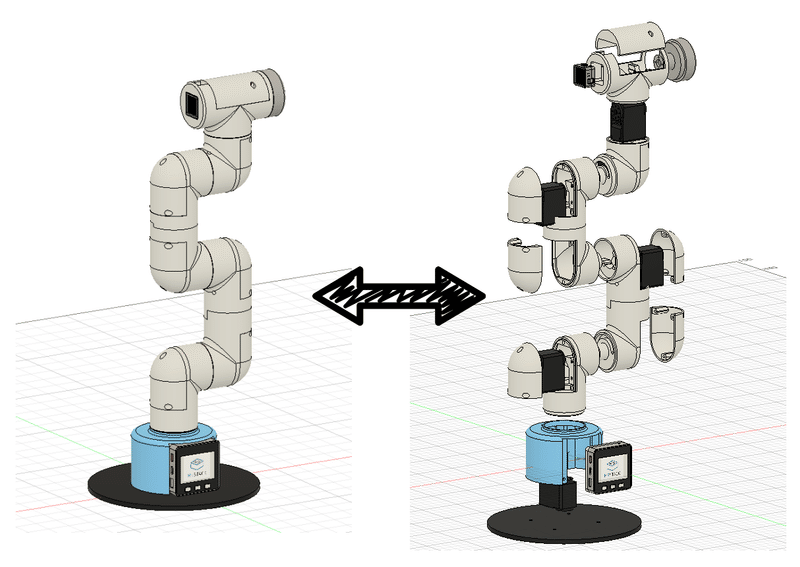
構成部品が決まれば、まずは早々に3Dモデリング。ラピッドプロトなのだし、工数は3時間程度あれば十分かな。使用するCADはFusion360。まずはイメージを掴むべく、スイープコマンド等を活用しながら、それっぽい全体モデルを作る。
M5Stack、Atom等の既製品はGrabCADを活用する。
その後、細かな部分をモデリングしていく。基本はただただ、サーボをうまく固定していくだけの作業。myCobotの寸法や意匠は、公式サイトの写真から雰囲気を掴みつつ設計していく。(後日、2020年12月18日に公式のGitHubでSTEPモデルは公開された模様)
気を付けるべきは、配線の取り回しくらいかな。軸が可動したときに配線が挟み込まないよう、円弧上の溝を空けておくことがポイント。あとは3Dプリンタでの造形も考慮しながら、可動部の寸法公差にも気を配り、アセンブリを構成していく。基本的なソリッドモデリングができ、ボディの分割・結合が使いこなせる人なら、そこまで難しくないと思う。
レンダリングするとテンションが上がるので、モデルが完成した際にやっておくのがオススメ。
造形
実は私、今年の秋頃にFLASHFORGEのAdventurer3Sを購入した。最近は価格改定もされ、お値打ち価格なのでオススメだ。
全ての部品は自宅の3Dプリンタで造形。しかしながら、やはりそこそこの時間を要する為、会社に出勤している間や就寝時間を駆使しながら、うまく稼働効率を上げられるよう、造形物と時間配分を工夫した。
全体の造形時間と材料使用量は以下の通り。
部品点数:15個
総時間:53時間18分 (約3日)
総重量:495.3g (500gフィラメント1巻分消費)
12月18日(4日目)には全部品の造形が完了した。
【自作myCobot4日目】
— 小林竜太 (@CH1H160) December 18, 2020
なんとなく全軸ついた。ATOM Matrix行方不明だったので、黄金のATOM Liteで暫定処置。明日動かすよ!#myCobot #M5Stack #自作myCobot pic.twitter.com/OBCDsNNG92
組立
メカ部品はボルト締結するだけなのでとても簡単。ちなみに3Dプリンタによる造形部品には、ビットインサートを使用している。はんだごてで溶かすだけで接着可能だ。
組立の様子をTwitterに公開していたのだけれど、途中でmyCobot公式からアドバイスが届いて嬉しかった。「J4~J6軸のサーボ大きいからJ2トルク足りないかもよ。GithubにURDFとSTEPファイルあるから参考にしなよ」といった内容。正直「3Dモデル公開されたんだ…」という複雑な心境はあった。せっかく見た目だけでモデリングしたのに…(笑)。J4~J6軸については同じ感想を抱いてるけど、手持ちがないから今回は諦める。多分動くと信じてる。
That looks amazing. I saw that your J4~J6 are using large servos, which may cause insufficient J2 torque. Some optimizations may be needed. You can refer to our 3D model, and we encourage all makers to visit our Github for urdf. and stp. files which will be helpful for DIY. https://t.co/vfKGmxhwgQ
— myCobot Official (@CobotMy) December 18, 2020
ネックだったのは電気組付。配線づくり、はんだ付け、取り回しが少々手間だった。M5StackとAtomの配線も必要だし、配線長の算出にはやはり実機で軸を可動させながら確認した方が良い(卓上サイズならCADに頼るよりも結果として早い)。とはいうものの、せいぜい2時間もあれば終わる。
制御
時間軸が前後するが、電気作業手前でサーボの設定作業を行った。軸番号や0点位置の調整の為である。LX-16Aは下記ユーザーマニュアルが公開されている為、それに基づいて実行した。
続いて、M5Stackによるモータ制御の話。普段の開発では、VSCode+PlatformIOを愛用している。PlatformIOが便利過ぎて、もう他の環境で開発できないくらいだ…(笑)
ちなみに、LX-16AはArduinoライブラリも公開されている。
まずは無線コントローラで6軸を自在に動かしたかった為、Blynkを使用しスマホから操作することにした。各軸ごとにスライダーコントロールを用意し、その値を軸の旋回角度としている。
そんなこんなで、これも2時間くらいかな。12月20日(6日目)にはコントローラから自在に操作できるようになった。
【自作myCobot6日目】
— 小林竜太 (@CH1H160) December 20, 2020
本家っぽい動きまで完了!1週間かからずできたね!さあ、あなたもmyCobotを作ろう!笑#myCobot #M5Stack #自作myCobot pic.twitter.com/6yLfNZEI9W
ディストピア感が出るかなと思い、横には卓上ロボのCHIROを置いてみた。
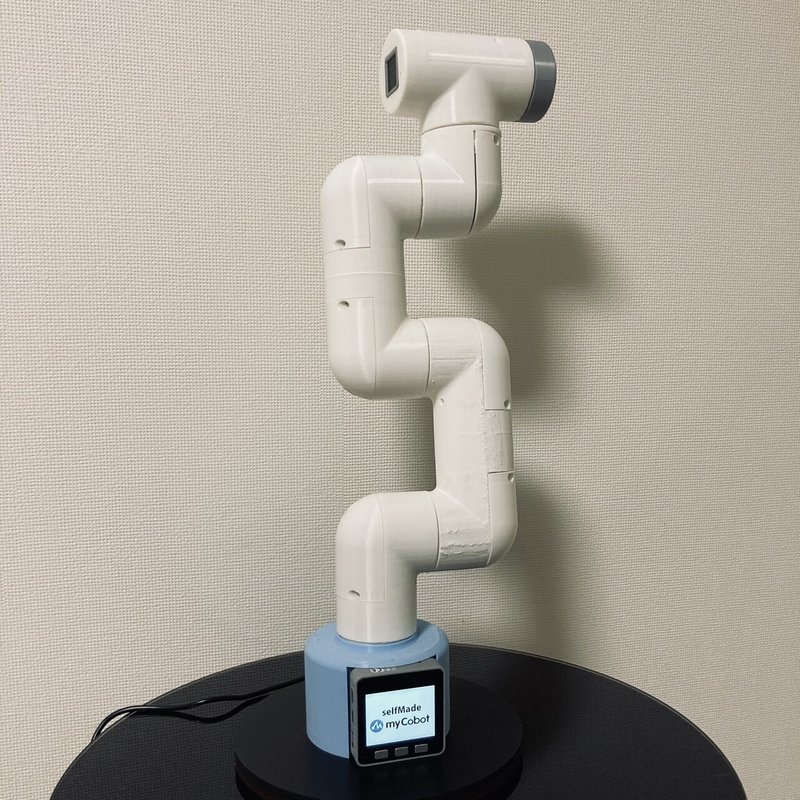
結果、6日間かけて、自作myCobotが完成した。
原価
自作するなら皆知りたい情報だよね。材料費のみを記載する。ただし、冒頭で述べたように自宅にあった物なので、新規購入はしていない。価格相場と購入実績をベースに算出してみた。

結構安くできた。多分、本家も材料費は同じくらいだと思う。ただ当然のことながら、人件費だったり、生産工程の作り込みには膨大な費用が掛かる為、販売価格として、6万円弱はなかなか挑戦的だよね。
公式はソフトウェアを公開しているのも魅力的。ハードエンジニアは是非一度、私みたいにロボットアームを自作すべきだと思ってるけど、ソフトエンジニアは、逆に購入してすぐ試した方が良い。ROS連携もできるようだし。
活用方法
こういうロボットアームって、とても汎用的で色々学べるのだけれど、キラーコンテンツを生み出しにくいのが難点だと思ってる。もちろん中には、良い活用方法を見つけて、ビジネスに繋げられるケースも多いけどね。DOBOT Magicianを用いた朝食ロボットなんかは、ビジネスに繋がる良い例。
1週間以内でハードは出来たので、今度はもう1週間くらいかけて活用方法を模索することにした。
【活用事例① 文字や絵を描く】
ベタなやつ。制御が難しい上、所詮個人Makerでは本気でやってる大企業に負けてしまうので、あまり深堀したくないのが本音。
【自作myCobot7日目】
— 小林竜太 (@CH1H160) December 21, 2020
遊び方を考える編に突入。まずは何か描いてみる!プログラミング頑張らんと…#myCobot #M5Stack #自作myCobot pic.twitter.com/VwBJKRpxiQ
【活用事例② ベルを鳴らす】
これは結構面白いなと感じた。リズムを刻めば本格的な音楽に鳴りそうだし、なによりロボットアームの見栄えもかわいい。
【自作myCobot8日目】
— 小林竜太 (@CH1H160) December 22, 2020
シンプルにこういうの楽しいんじゃない!?踊るロボットアーム!メロディ奏でたいな!#myCobot #M5Stack #自作myCobot pic.twitter.com/IYpSMJVScx
【活用事例③ 拍手する】
無駄づくり。モノボケに近い。ヒーローズリーグのMashUpアイデア。メロディを奏でるという点ではベル同様の面白さがある。
【自作myCobot9日目】#ヒーローズリーグ 作品「かたてま」をMashUp!手をかざすことで、拍手に使用する片手を代替してくれるよ!(この為だけにカスタネット買いました…笑)#myCobot #M5Stack #自作myCobot pic.twitter.com/BzXUKhIamb
— 小林竜太 (@CH1H160) December 23, 2020
【活用事例④ 金魚すくい(スーパーボールすくい)】
こちらもヒーローズリーグのMashUpアイデア。これはめちゃくちゃ楽しい。MakerFaireに出展したり、ロボカップ競技にも出来そう。普通に縁日に置いたら便利だし、人気コンテンツになりそう。
【自作myCobot10日目】#ヒーローズリーグ 出場作品「リモート金魚すくい」をMashUp!ロボットアームで金魚すくいって、めちゃくちゃ楽しい!!さすがに金魚は買えなかったから、スーパーボールで代用!#myCobot #M5Stack #自作myCobot pic.twitter.com/ZTpU1A9N7J
— 小林竜太 (@CH1H160) December 24, 2020
【活用事例⑤ ヘッドライト】
スマートライト的なアイデア。自在な方向に光を照らす。ただ、6軸もいらない気はする。パンチルトの2軸で十分かな。
【自作myCobot11日目】
— 小林竜太 (@CH1H160) December 25, 2020
今日はシンプルに明かりを照らす。ピクサーのルクソーJrみたいだね!#myCobot #M5Stack #自作myCobot pic.twitter.com/bhhotHgkHi
【活用事例⑥ ペット・相棒】
J1軸に頭をつけることにより、ペットのような振る舞いをさせる。6軸もあると生き物感が強調され、親しみやすさが増す。つける頭によっては怖さもあるが(笑)
【自作myCobot12日目】
— 小林竜太 (@CH1H160) December 26, 2020
myCobotとClicbotをMashUp!目は中にスマホ入れてるだけだよ#myCobot #M5Stack #自作myCobot #Clicbot pic.twitter.com/G05w7IC0Fl
魔改造の夜、放送の度にキングスパニエルの近況報告してたから、今日もやるよ!遂にロボットアームと化したスパニエルちゃん…#魔改造の夜 #myCobot pic.twitter.com/yz7m2ogc9D
— 小林竜太 (@CH1H160) December 26, 2020
【活用事例⑦ モビリティ乗車】
SegwayDriftに載せてみた。アームの位置で重心移動できるから、倒立制御のモビリティを操作することができる。なかなかエモい光景だ。
【自作myCobot13日目】
— 小林竜太 (@CH1H160) December 27, 2020
私は気づいてしまった…myCobotがSegwayDriftに乗れることに!
アームを動かして重心を変え、前進後退ができる!なんだこれ(笑)#myCobot #M5Stack #自作myCobot #Segway pic.twitter.com/PDrAjwWkCy
【活用事例⑧ バーチャル連携】
リアルとバーチャルが連動する事例。簡易的だが、myCobotは関節の自由度が高い為、色々応用できそうだ。この程度の動き作るのも、最近はUnityで簡単にできるので良き。
【自作myCobot14日目】#ヒーローズリーグ 出場作品「頭なでなで装置」をMashUp!Unity上のキャラの動きに合わせて、頭をなでなでしてくれるよ!絵面がやばいな…笑#myCobot #M5Stack #自作myCobot #Unity pic.twitter.com/LnomCX9uGd
— 小林竜太 (@CH1H160) December 28, 2020
【活用事例⑨ 天井プロジェクター】
ホームオートメーションのアイデア。カーテンレールにロボットアームを吊るすことで、より広範囲のプロジェクションが可能となる。普通に便利だし、家電としてとても有用。
【自作myCobot15日目】
— 小林竜太 (@CH1H160) December 29, 2020
カーテンレールを活用しロボットアームを天井から吊るしてみた。これでプロジェクターの映像が部屋のどこへでも投影可能だ!#myCobot #M5Stack #自作myCobot pic.twitter.com/mQLYZbwWmQ
【活用事例⑩ ロボットアーム】
その名の通り、ロボットアーム化してみた。長さもちょうど人の腕くらい。まるでターミネーターかのような姿で、ディストピア感満載である。
私はついに人造人間を造り出してしまったようだ…笑#myCobot #M5Stack #自作myCobot pic.twitter.com/Iem9TZ3PQb
— 小林竜太 (@CH1H160) December 30, 2020
【活用事例⑪ モビリティ連結】
モビリティの尻尾としてロボットアームを装着させた。新しい形のルンバみたいだよね。オブジェクトを把持して移動させることができるので、なかなか便利である。制御は難しいけれど。
【自作myCobot17日目】
— 小林竜太 (@CH1H160) December 31, 2020
筋斗雲型モビリティ「きんとん」に、尻尾としてつけてみた。物の把持も自由自在!お手伝いしてくれるペットロボみたいだね!#myCobot #M5Stack #自作myCobot #大晦日ハッカソン pic.twitter.com/l7dCj0uBb1
今後も色々試していく予定。とりあえず12月31日(17日目)までに試した活用事例を紹介してみた。
まとめ
小型ロボットアームというのは、なかなかのレッドオーシャン。これまでもSTEM教育を目的と謳い、数々の製品がクラウドファンディング等で発表、販売されてきた。個人的には「本当に役に立つかな?」という怪訝さから、なかなか購入や自作ものづくりに踏み込みきれない部分もあった。
今回myCobot自作し、試してみて気づいたのは、6軸あればかなり自由度の高い活用が期待できるということ。これは今まで市販されてきた小型ロボットアームと、大きく異なる点ではないだろうか。
強いて不安点を挙げるならばペイロードかな。公式は250gらしい(私の自作品はJ4~J6軸が重いから、もう少し低い)。ただ、軸の制御方法を工夫すればなんとかなりそうにも感じる。せっかく自作したので、今後はJ2軸をダブルモータ化して強化オリジナル版にするのも面白いかもしれない。
実は本音を言うと、この自作開発にはもう一つの想いがあった。冒頭での、「myCobotは特に日本のM5Stackユーザー、コミュニティを中心に大きな賑わいをみせている」という点。私はここに悔しさがある。
「これだけ日本でM5が盛んであるならば、myCobotのようなロボットアームだって、日本のスタートアップから生まれても良かったんじゃないか?」という悔しさだ。
以前、高須さんがこんなことを呟いていた。
「メイカー」は、テクノロジーとクリエイティブとアントレプレナーシップの間にあります。
— TAKASU@Nico-Tech Shenzhen ニコ技深センコミュニティ (@tks) November 13, 2020
日本はテクノロジーとクリエイティブに寄りすぎ、中国はアントレプレナーシップに寄りすぎだと思うけど、タイはいいバランスにあると思うなー。https://t.co/YS997vNQfK
まさしくその通りなんだよね。別に悪い事ではないんだけど、私自身モヤっとしている。そして、じゃあ私がスタートアップに繋げるかといえば、多分繋げない。「楽しそうだから作る」がコンセプトで、まさしくテクノロジーとクリエイティブ特化型。
メイカー特性を嘆いていても仕方がないし、今後日本でmyCobotを活用したビジネスが沢山生まれるのも、それはそれでとても素敵なことだと思う。ただ一見すると日本のものづくり要素が強そうなハードウェアスタートアップで、他国の一歩先を歩めないのは非常に心残りである。
その心残りを発散すべく取り組んだのが、この自作myCobotなんだよね。一歩負けた理由を、自分で作ってみることで知りたいのだよ。例えば、自作で中華サーボ使用したのは、分かりやすい例。もはや国産サーボで安価なものづくりなんてできないわけさ。
学ぶ姿勢はとても大事。このElephant RoboticsやM5Stackを始めとした中国のハードウェアスタートアップを通じて、私は色んなことを知りたい。優勝劣敗をはっきりさせた上で立ち向かわなければならないのだから。
この記事が気に入ったらサポートをしてみませんか?