ローカル5Gを使用した遠隔収穫システムの開発

もう一つの特許も成立しました!
森が書いた前回の記事では吸引型収穫システムの構造についてお伝えしました。この記事の中で特許を一つ取ったということで気をよくしてもう一つ特許を出願したと書きましたが、こちらの特許も成立しました。出願から成立まで18日間でこれも最速記録を更新です。森も含めて特許に関わったことのある社内の関係者は、これまでの経験を踏まえてありえない速さだとびっくりしています。今年から導入されたスタートアップのための「スーパー早期審査」のおかげです。この制度創設に尽力された皆様には感謝申し上げます。
特許庁:スーパー早期審査について 令和6年1月22日 調整課
ローカル5Gを使ったロボットによる遠隔収穫
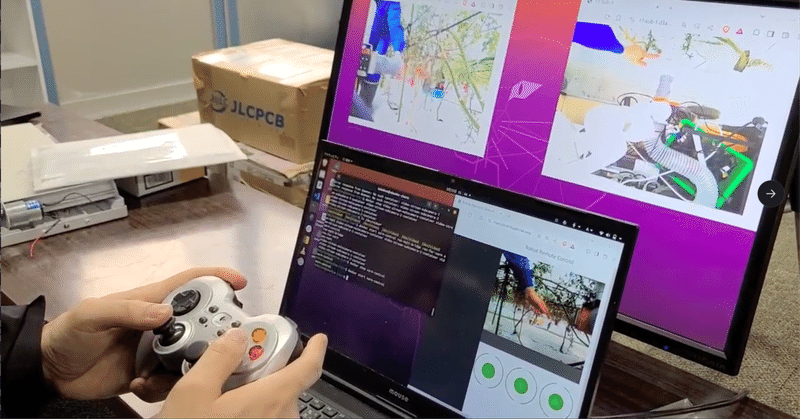
繰り返しになりますが、先日のNHKの取材では我々の吸引型収穫ロボットが取り上げられました。吸引収穫と並んで、このニュースのもう一つのポイントは遠隔地からの収穫ロボットの操縦という点です。
我々の吸引型収穫ロボットは全自動による収穫動作が可能です。
全自動収穫は以下のような手順になります。
トマトの位置を検出
独自アルゴリズムの成熟度判定
収穫するトマト決定
自動的・連続的に収穫動作を実行
ただ、全てを型通りの動作で収穫することはできないので、遠隔操縦に頼って難しい位置にあるトマトの収穫も視野に入れています。
今回の遠隔システムでは、映像をAWS Kinesis Video Streams web RTC、ロボットへのコマンドをAWS IoT Core DeviceによるMQTTにより送ることで、操縦者とロボットを繋いでいます。取材の目玉になったのは無線でロボットと通信するためのローカル5Gのシステムでした。これは、以前からトクイテン農場のある知多市のケーブルテレビ局・知多メディアスさんと共同で行っている実証実験です。NHKの取材では、我々同様名前が出ませんでした(残念)。
技術的に少しわかりづらいのは、ローカル5Gの恩恵は農場に設置されているローカル5Gの基地局とロボットの間だけというところでしょうか。
ローカル5Gの恩恵は以下の2点になります。
通信が高速
電波の届く範囲がWifiに比べて広い
我々のシステムでは、操縦者が例え地球の裏側にいたとしてもロボットが操縦できるようにAWSを使った接続を行っています。つまり、ローカル5G基地局との間にはインターネットとAWSが挟まってしまうことになります。
これにより、通信の高速性についてはインターネットやAWSがボトルネックになる可能性が残ります。ただ、ローカル5GではWifiでは難しい距離の通信でも可能になっているため、ローカル5Gの真価はより広い農場でのロボット運用で発揮されると考えています。
ロボット開発の仲間を募集しています!
トクイテンではロボット開発を一緒に行う仲間を募集しています。正社員希望、業務委託希望などや開発分野などは応相談となっています。開発関係はロボットソフトウェアで募集をかけていますが、トクイテンで働いてみたいという方がいれば分野問わずお問い合わせください。
会社の将来計画や現在の状況をとりあえず知りたいという方は、まず会社説明会への参加をお勧めします。
この記事が気に入ったらサポートをしてみませんか?