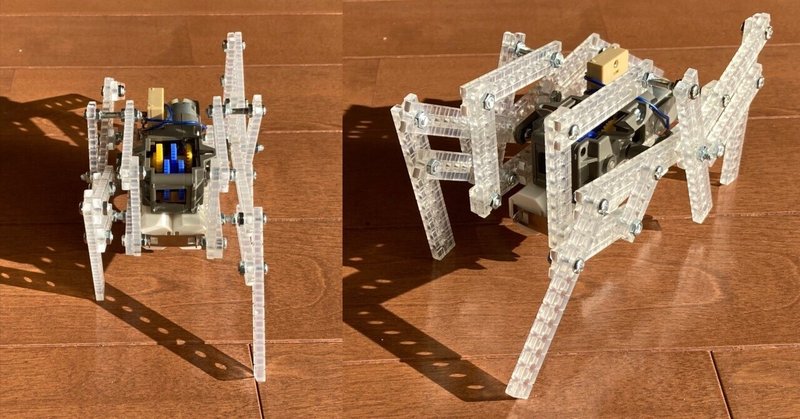
リンク機構ロボ「SAnt」の作り方

SAnt はNIロボが設計し(株)タミヤ製工作材料を用いて製作するリンク機構ロボットです.前の記事の TVictory と同様に一つのモータで6本の脚をリンク機構によって駆動します.TVictory の前後脚は上下動しない”なんちゃって”脚なのに対し,SAnt は TVictory の元となった MVictory と同様なパンタグラフ機構を採用しているので,前後脚,中脚,全て円運動を行います.そのため姿勢のフラつきが少なく,また,TVictory より高低差がある段差にも対応できます.
下記動画で作動をご覧頂けます.
中脚は TVictory/MVictory が用いている V 字機構よりオーソドックスな,2節リンク機構です.これはクランクの回転を2倍に拡大した運動を行うので,前後脚のパンタグラフ機構もこれに合わせて2倍に拡大するようにロッドの長さと取り付け位置が設定されてます.結果的に TVictory/MVictory よりダイナミックな動きが堪能できます.リンク機構の GIF アニメを示します.
TVictory より複雑で少し手間が掛かりますが,作り方の基本は同様なのでぜひ挑戦してみて下さい.
※本記事の前に「準備編1)タミヤ工作材料の使い方」をご一読願います.
ここから先は
5,033字
/
26画像
¥ 400
この記事が気に入ったらサポートをしてみませんか?