
火星っぽいところで実験をしてきました!

フィールド実験をしてきました
リーマンサット・プロジェクト、ローバーチームです。
記事にするのがすっっかり遅くなってしまいましたが,Go toトラベルが使える時期に野外での実験をしてきました!
と,いいつつも今回は予備実験という体裁でザックリした実験.
本番の通信試験や自律走行アルゴリズムは3月を予定しております.(といってもコロナでどうなるかは未定ですが…)
主には
・ログ計測
・画像取得
・フィールド実験のノウハウ蓄積
が目的でした.
ログ計測をしてみた

今回はSONY製スマートフォンをハックして開発したローバーに搭載し,姿勢や気圧などのログを計測しました.
結果は概ね良好!
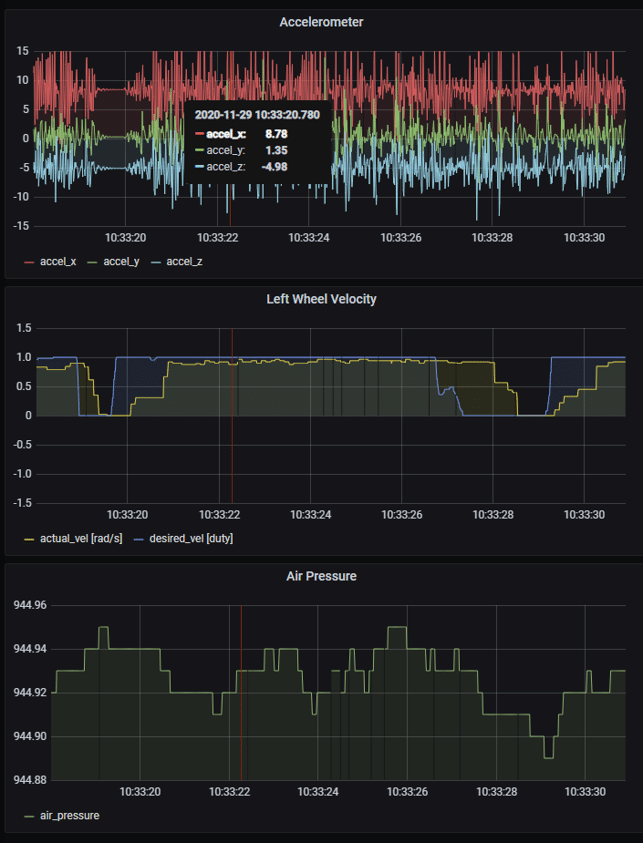
一部ログ欠けなどの課題も見つかりましたが,次回に向けてスタック検知や物体検知などの自律走行への足掛かりを得ました.

他にも初めてホイールセンサ搭載のモータの走行試験を行いました.
回転速度が無事計測できているので,将来的には自己位置の推定などを含めたより高度な自律走行もできそう…!


引き続き月面への歩みを止めない!
まだまだコロナでなかなか開発が思うように進まない状況ですが,引き続き開発をがんばります!
リーマンサット・プロジェクトは我々ローバーチーム以外にも人工衛星や宇宙服などの開発チームもあります.
毎月オンラインで定例会を開催していますので,興味を持った方はこちらから!
私たちの活動は、皆さまからのあたたかいご支援によって支えられています。 いただいたご寄付は、プロジェクトの活動で大切に使わせていただきます。 宇宙開発分野の発展のためにアマチュアの宇宙開発団体だからこそできることを進めていきます。