PdMによるブログリレー@MoT「道路情報の自動差分抽出プロジェクト」

はじめに
こんにちは!株式会社Mobility Technologies(MoT)のプロダクトオーナ兼エンジニアの渡部徹太郎です!
いま、MoTのプロダクトマネージャーでブログリレーをやっておりまして、本投稿は2/9の記事になります。
本日のプロダクト紹介は、MoTの次世代事業部にて研究開発されている「道路情報の自動差分抽出プロジェクト」です。
「道路情報の自動差分抽出プロジェクト」とは
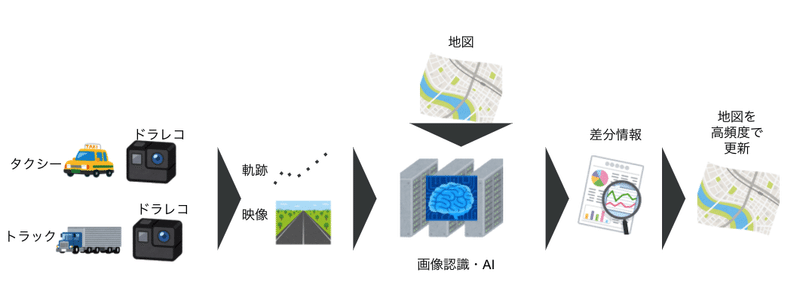
これから来る自動運転社会では、今までよりも更新頻度が高い地図が求められます。しかし、従来の人力で調査する方法では、手間と時間がかかり求められる頻度で地図を更新できません。
そこで、このプロジェクトでは、タクシーやトラックにつけた大量のドライブレコーダから取れる画像データを元に、AI等を用いて道路の情報を認識し、地図との変化点を自動で見つけ、地図の更新を早めようとしています。
このプロジェクトは大手地図会社である株式会社ゼンリン様との共同研究であり、ゼンリンの地図という形で世の中に提供されます。
このプロジェクトは2020年4月に始まり、現在は研究開発中の、MoT期待の次世代プロダクトです(以下にプレスリリースのURLを掲載します)。
どうやるのか
1. 大量のドライブレコーダの画像を用意する
このプロジェクトでは、大量のドライブレコーダの画像が必要になります。そこで登場するのがMoTの次世代AIドラレコサービスのDRIVE CHARTです。
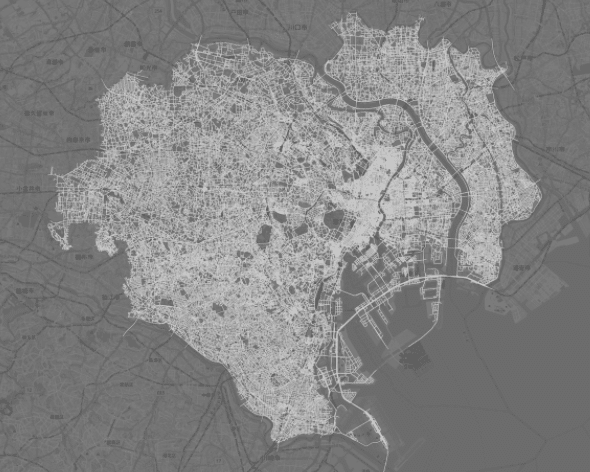
DRIVE CHARTは累計3万台の契約があり、大量のドライブレコーダのデータを使うことがきでます。この大量のドライブレコーダは、動くセンサーとして日本中の道路をくまなく撮影してくれます。以下の図は、DRIVE CHARTが1 ヶ月で走行した東京23区、三鷹市、武蔵野市の様子です。ご覧の通り隅々まで撮影していることがわかります。
DRIVE CHARTの詳細は下記ブログを参照してください。
2. 機械学習(AI)により道路の情報を認識する
次に、ドライブレコーダから取れた画像に対して機械学習(AI)の技術を用いて、道路の情報を認識します。
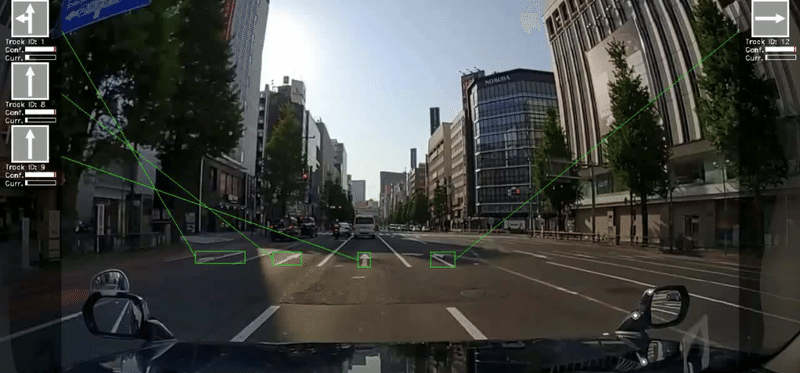
認識する対象は様々であり、以下の図では最高速度標識や駐車禁止標識、そして信号機を検出しています。

他にも、道路上に書かれた矢印ペイントも認識する必要があります。これは交差点においてどのレーンからどのレーンに曲がれるかを知るために必要です。
加えて、道路の走行領域や幅の情報も必要です。以下の図ではセマンティックセグメンテーションと呼ばれる画像から対象領域を見つける機械学習の応用技術により、道路の走行領域を認識しています。
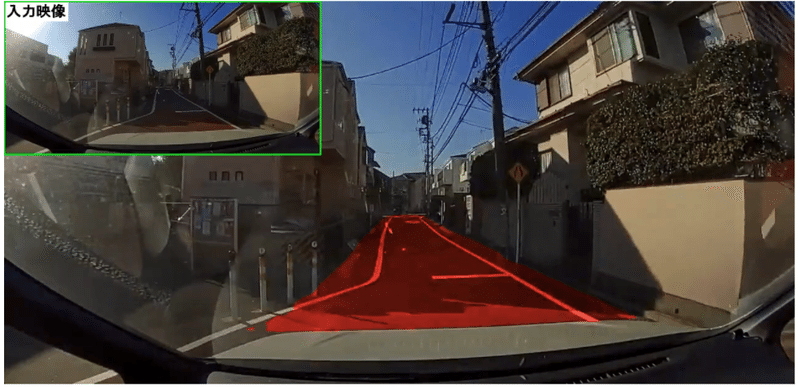
このように、道路上の様々な情報を認識します。
3. 位置を特定する
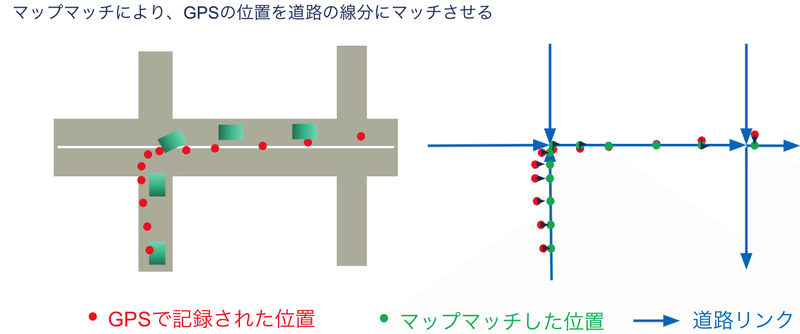
ドライブレコーダの画像から道路の情報が認識できても、それがどの位置の情報なのかがわからなければ地図と比較できません。そこで、登場するのがマップマッチという技術です。マップマッチによりGPSの位置情報を道路上の位置にマッチさせます。
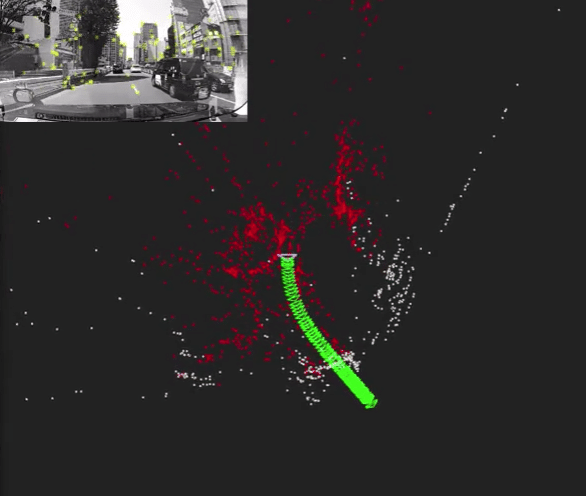
また、GPSのデータは誤差があるため、より正確に位置を推定するためにSLAMといった技術を用いることもあります。SLAMでは画像上の特徴点から周囲の空間を認識し、その中での自分の位置を推定する技術です。
4. 地図と比較する
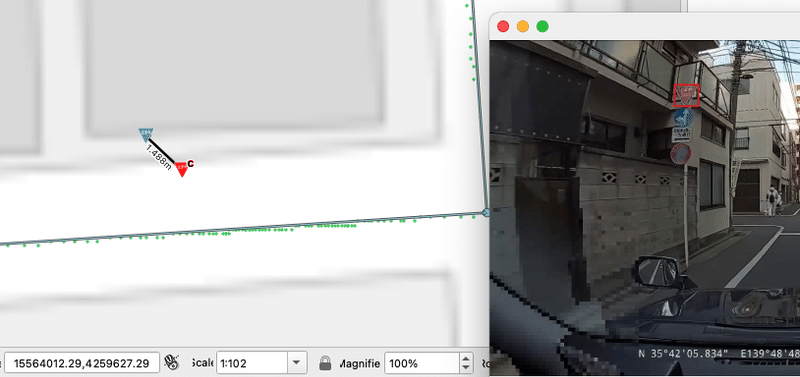
最後に、位置を特定した道路の情報と地図と比較します。以下の図では、認識した一時停止標識の近くに地図の一時停止標識があるため、地図にある標識が現地にもあることを確認しています。今までは実際に現地に行って調査する必要がありましたが、このシステムではDRIVE CHARTを搭載した車両がその道を走行すれば確認できます。
最後に
これまで「道路情報の自動差分抽出プロジェクト」を紹介してきましたが、このプロジェクト最大の魅力は、技術力を生かして世の中の役にたつシステムを生み出そうとしていることだと思います。以下のブログでは主要メンバーがプロジェクトの魅力について語っていますので、是非ご覧になってください。
この記事が気に入ったらサポートをしてみませんか?