Inventor / モデリングテクニック / アセンブリ / コンポーネントの配置(1)

アセンブリモデルでは、構成するコンポーネントを然るべき姿勢(位置と向き)に配置する必要があります。通常、アセンブリ拘束の機能を使いますが、それ以外のやり方もあります。
コンポーネントの位置決めをする方法
原点に配置したコンポーネントは、「固定」する
トップダウン設計においては、ほとんどの部品の位置関係は、上位のスケルトンパーツので決定されます。コンポーネントの作成で、原点に配置されるので、アセンブリが完成しているように見えます。
実際には、原点に配置されているだけなので、ドラッグすると自由に移動してしまいます。不用意に移動することもあるので、コンポーネント化したタイミングで、全てのコンポーネントを「固定」します。

固定したコンポーネントは、ブラウザ上に押しピンのマークが付きます。
プロパティのオカレンスで位置を指定する
「固定」は、原点に配置したコンポーネントに適用することが多いですが、位置(XYZ座標)が分かっている場合にも使います。その場合は、コンポーネントのプロパティ(iProperty) のオカレンスタブで設定します。
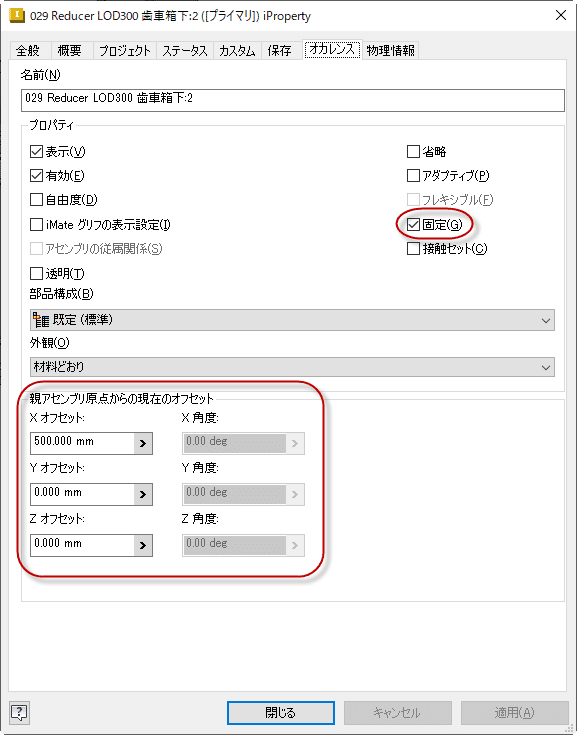
原点に配置した後、固定をする前に、不用意にドラッグしてしまう場合があります。その時も、プロパティ→オカレンスでXYZオフセットを全て、0にすれば原点に戻ります。
「拘束」では無く「ジョイント」を優先して使用する

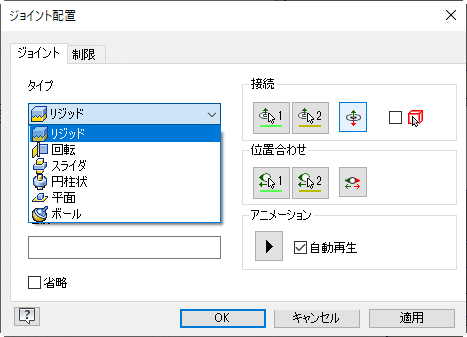
原点に配置しないコンポーネントは、アセンブリ拘束が必要です。アセンブリ拘束の機能としては、当初「拘束」のみが用意されていましたが、Inventor2014 からジョイント(Joint)の機能が提供されました。
どちらの機能を使っても良いですが、ジョイントを優先して使用することをお勧めします。コンポーネント間の関係(Relation)を表すのが、ジョイントだからです。
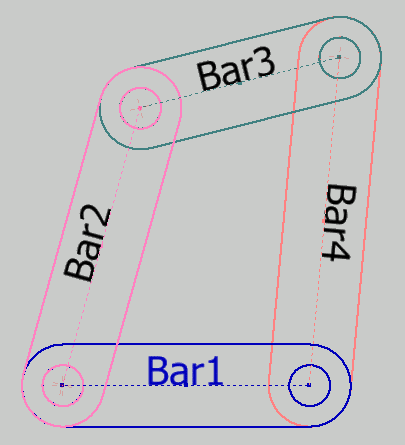
機械設計では、モノの動き(直線運動や回転運動など)を扱いますが、これは機構学の知識を利用します。機構学では、モノの動きを「節」と「対偶」で表現します。下の図は、4節リンク機構の図ですが、Bar1-4 が節、繋がっている部分が対偶です。この4節リンクの場合は、繋がっている部分は、Inventorのジョイント-回転で定義できます。つまり、対偶=ジョイントという事です。
対偶については、以下の記事が分かりやすいです。
ジョイントを使う利点
ジョイントを使う利点は、大きく二つあります。
より少ない手数で、位置を決めることができる。
「拘束」を使って位置を固定する場合、コマンド操作が3回必要ですが、これがジョイントでは1回の操作で済みます。これは、作成するときだけでなく、設計変更の場合も同じなので、手数が少ないというのはとてもありがたいです。
コンポーネント間の関係を直感的に表現できる。
回転、スライダ、円柱状など、表現したい動きに対応したジョイントが用意されているので、コンポーネント間の関係が直感的にわかります。これは、設計の意図を表現するにはとても便利です。特に設計変更のときに便利です。
※ Autodesk Fusion では、アセンブリ拘束の機能としてはジョイントだけが用意されています。
コンポーネントの配置のテクニックについては、次の記事で詳しく紹介します。
役に立った!という記事にはぜひサポートお願いします。サポート頂けると大変に励みになります。