自己紹介

はじめまして
はじめましてNIロボです.
幼少の時よりリンク機構ロボットの設計&製作を行っています.
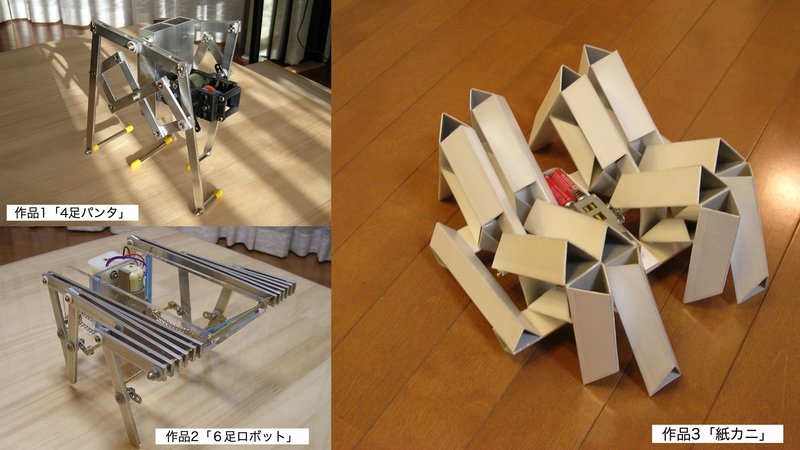
下の画像はハンズ大賞(東急ハンズが主催したアートコンペ)に出品したものです.作品1と2は2005年に同時に入賞し、作品3「紙カニ」は2007年に審査員特別賞を受賞しました.「紙カニ」の歩行機構と構造はその後の作品の基礎となりました.
note では主にハンズ大賞後に製作したロボットとその作り方を紹介します.
作品は YouTube の「NIロボチャンネル」にアップしたものの中から厳選し,構造や製作法の詳細を公開します.
タミヤ工作材料によるリンクロボ
NIロボではリンク機構ロボットを対象としています.
リンク機構ロボットとはモーターの回転運動を往復運動や揺動運動に変換する機械ーリンク機構により動物の歩行を模したロボットです.
センサーやマイコン無しで原則1つのモーターで駆動するローテクな機械なので,理解しやすくかつ安価で製作できます.
しかしながら,歩行リンク機構の設計,部品加工,組み立ては意外に難しく,筆者も長年試行錯誤を繰り返しました.
前述の「紙カニ」はパンタグラフ機構の応用した8本脚ロボットです.
紙カニ発表の後年,この機構にロッドを2本追加するだけで簡単に6脚ロボットが実現できることに気がつきました.
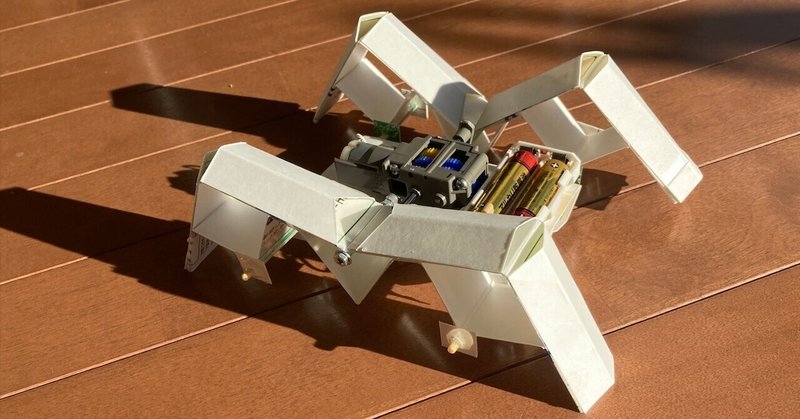
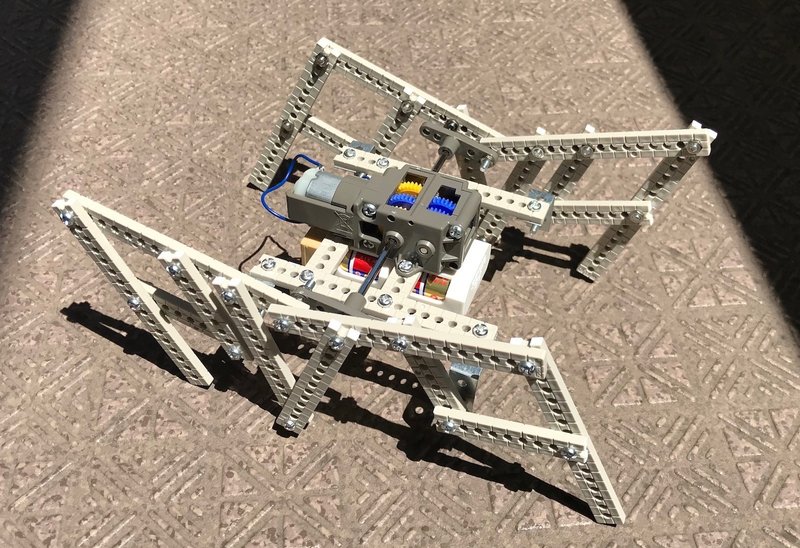
さらに(株)タミヤのユニバーサルアーム等の工作材料を利用することで製作方法の簡易化を試み,完成したのが「MVictory」です.
MVictory の作り方を iOS/iPad アプリ「ロボ指南1エム・ビクトリー編」として発表しました.(現在はメンテナンス中につき非公開)
タミヤ材料を使ったロボットは,その後さらに構造,製作性のブラッシュアップを計り,リンク機構のバリエーションも増やし,YouTube 等で公開ししています.
牛乳パックロボ
ロボット製作において,身近な材料で製作することを自身の課題の一つとしています.「紙カニ」はその一例として材料にボール紙を使用しています.
紙は加工しやすいという利点がありますが,強度に難点があります.
そこでボール紙を断面が三角形の棒状に梱包テープで貼り合わせ,はり(梁)を作り,脚や本体の構造に用いました.
関節は2本のはりの端面の三角形の1辺のみつながった,折紙の折れ目のような作りになっています.
ボール紙は菓子箱などから容易に入手できますが,製品により紙質がかなり異なり,特に関節の耐久性を左右します.また,サイズもまちまちです.
そこでどの家庭にもあり,高品質なボール紙製品ということで牛乳パックに着目しました.
note ではタミヤ材料を使用したロボと,牛乳パックを使用したロボの2つのシリーズのリンク機構ロボットの製作法を中心に紹介していきます.宜しくお願い致します.
自作アプリ
ちなみに,筆者は iOS/iPadOS/macOS アプリの作成と頒布も行っています.
アート系画像処理,手書きメモ,関数電卓など多数アプリストアからDL可能です.ぜひご利用下さい!
↓アプリ紹介サイト↓
この記事が気に入ったらサポートをしてみませんか?