第2話「中身 後編その2」

前回の記事はここから
どれだけ時間かけてんだよコノヤローってなるかもだが、実を言うとそんなにかけてない。(記事を書かなかっただけ)
完成しました。妥協を乗り越えて。
結果から先にどうぞ
そういえば完成してます
— ペンギン104 Pygoscelis (@PenG104) May 20, 2022
空き缶シリーズ第1弾
真っ直ぐではないけど前には進む
サーボモーターは1個のみの使用です
バッテリーはラジコンのやつ
あと、LEDを仕込んでいるので目の部分が光ります。#ロボット #3Dプリンター #3Dプリント #空き缶 #Arduino #電子工作 pic.twitter.com/1erHu9yvlN
見ればわかる通り、プログラムも完成してます。
分けて書くのも面倒臭いと気づいたので、今回簡単に説明します。
全体像
下の写真を見て欲しい。
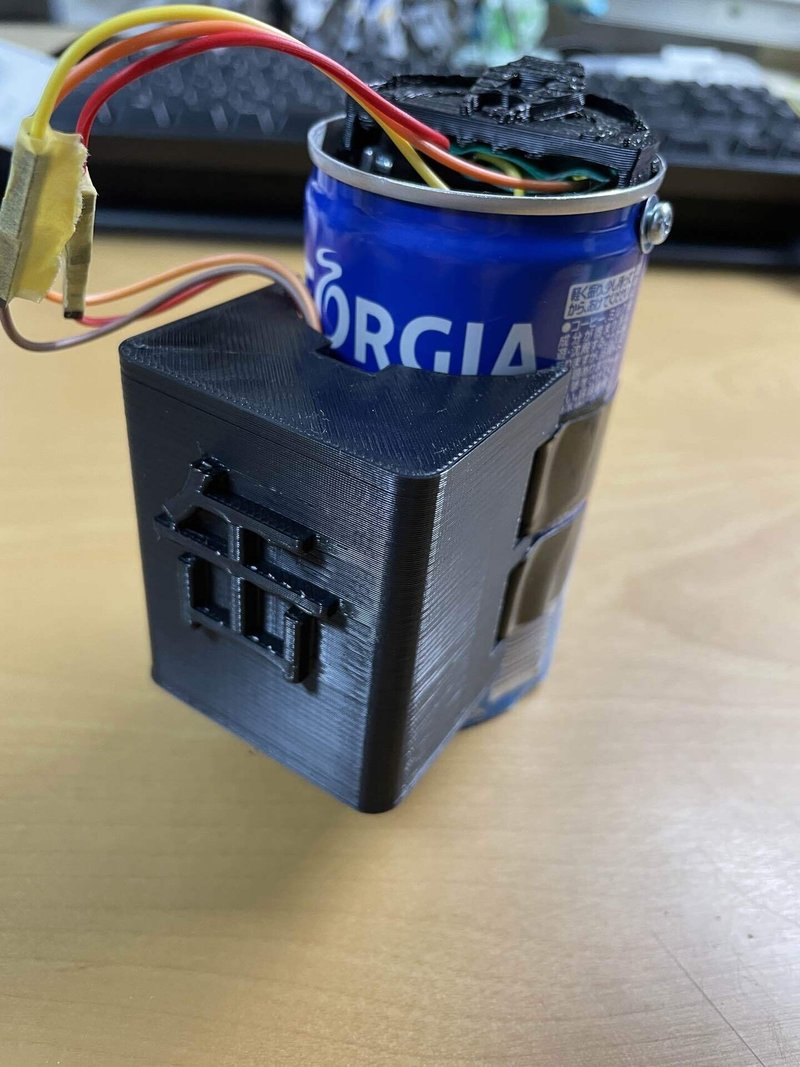
とてもじゃないが不格好という言葉が相応しい。
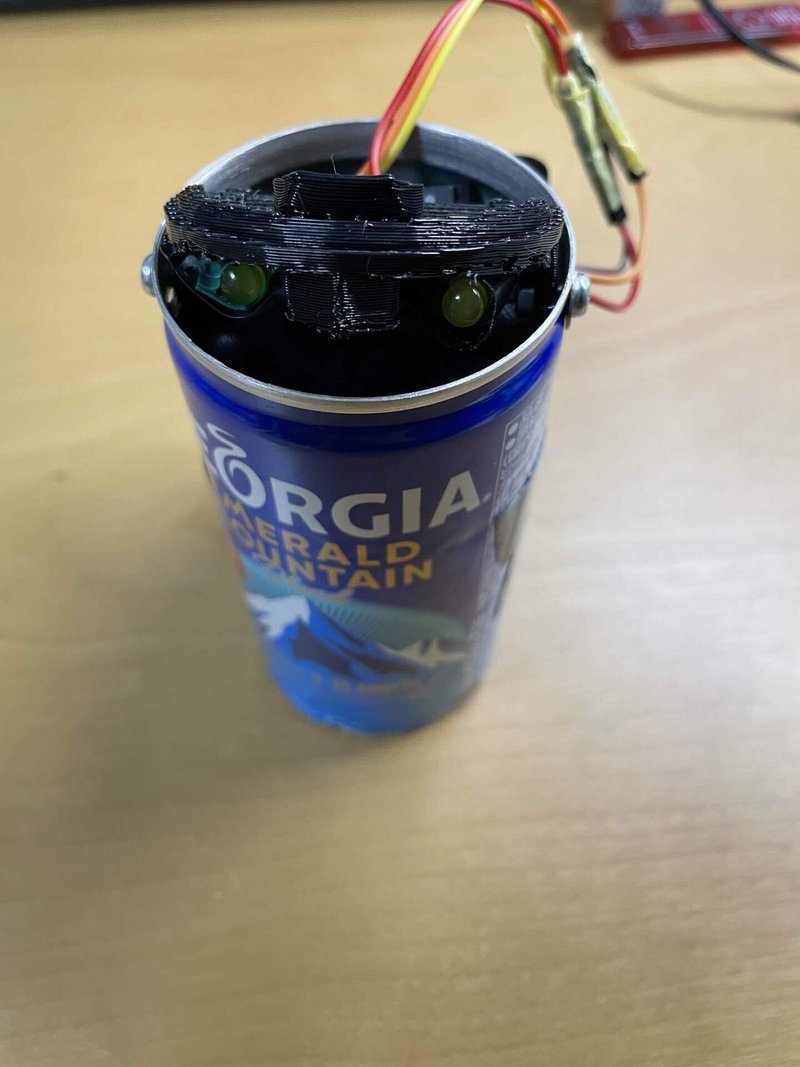
頭のパーツはなんや?ってなるかと思うが、
思い出してくれ、はんだ付けする時にLEDを使っていただろ?
あれは目を表現したくてつけたのだよ。
学校に持って行ったら「怖い」とか言われたけど、無理はない。
本当は、プルタブを開けるとスイッチがONになるという仕組みを作りたかったのだが、そもそもトグル?みたいな役割をするものに対してその動作を求めること自体が難易度を上げていた。正解というか、上手くいくとしたら、タクトスイッチを使うのがより上手くいったのだと後悔している。
プログラムについて簡単に
次にプログラムについてだ。
まあ、「プログラムについてだ」と言うほどすごいプログラムは書き込んでないのだが…
簡単に説明すると、サーボモータの角度の基準を90度とし、左右に30度回転させるというのが基本歩行で、これを応用すれば曲がったりしてくれると思う。(そもそもこのプログラムでも上手く真っ直ぐ進んでないけど)
それに加えて、LEDを搭載しているので、90度以外の時は光らせるようにしている。
このプログラムを組む時に使った手法は、状態遷移手法である。
ソースコードは人が見れるほど綺麗じゃないため、非公開とさせてもらう。
このロボを作ってみて思ったこと
僕がこのロボットを作ってみてまず思ったことは、空き缶の体積の小ささに驚きを隠せない。
まあ、ビール缶とかならまだマシだったかもしれないが、コーヒー缶にすることで色んな面白い事が出来そうと考えたため、ビール缶は使わなかった。そもそも未成年なので。
空き缶は手元にまだ沢山ある。(7個ぐらい)
1台作ってみて、「これはSFに近づけるかもしれない」と思うことが出来た。
今後もっと集積化して、未開封と並べても違和感のないぐらいに成長させたい。
今回、空き缶を中心にしてロボットをつくるという初めての試みをしてみたが、作っていて楽しかった。上手くいかないし、前に進まないし、半田の臭気は臭いし。これこそがものづくりの魅力なのだと言いたい。
普通の人から見たらただのゴミでも、僕から見たらそれは動いている。動いていたら捕まえて、それをつくる。とても不思議なことを言っているのはわかっている。でも、本当にそんな風に向き合っている。捨てるにはもったいない。これが僕の考えである。
今後について
今後はまたロボットを色々作ってみようと思うが、記事を書くかは気分次第とぐらい思っていて欲しい。多分空き缶からは一時離れると思う。二足歩行や、人間とのインタラクションなど考えることは無限にある。それらをぼちぼち解決していくのが今後の目標だ。最後まで読んでくれてありがとう。ではまたいつか。
この記事が気に入ったらサポートをしてみませんか?