マガジン


最近の記事








マガジン
記事

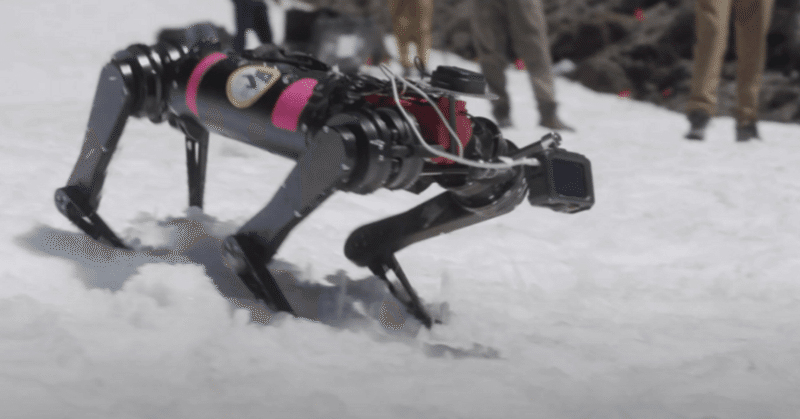
米カーネギーメロン大、米ワシントン大、英Google DeepMind社、歩きながら脚を使って物体を操作できる四足歩行ロボット「LocoMan」を開発
2024年3月27日、米カーネギーメロン大学、米ワシントン大学、英Google DeepMind社の共同研究チームは、歩きながら脚を使って物体を操作できる四足歩行ロボット「LocoMan」を開発し、プレプリント・サーバ「arXiv」に論文を投稿した。 このロボットは、その多用途性と器用さで際立っており、さまざまな物体操作タスクを効率的にこなすことができる。上部にアームを搭載した従来の四足歩行ロボットとは異なり、前脚にマニピュレーターを統合したユニークな設計により6次元操作

デンマークUniversal RobotsUR社、米MathWorks社の「MathWorks Connections Program」に参加
2024年4月9日、米国の数理計算ソフトウェ開発企業MathWorks社は、デンマークの協働ロボット企業Universal Robots(UR)社を、MathWork社の「MathWorks Connections Program」に迎え、両社のパートナーシップを強化すると発表した。 本プログラムは、MathWork社の「MATLAB®」および「Simulink®」をベースにした補完的な製品、トレーニング、コンサルティングを開発・販売する組織を支援するもの。MathWor

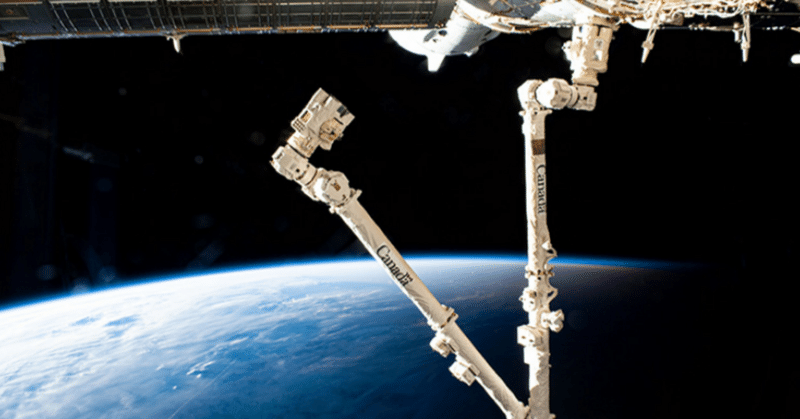
米カーネギーメロン大学、ヒューマノイドロボットの効率的な遠隔操作を可能にするフレームワーク「Human2HumanOid(H2O)」を発表
2024年3月7日、米カーネギーメロン大学(CMU)の研究グループは、人間サイズのヒューマノイドロボットの効率的な遠隔操作を可能にするフレームワーク「Human2HumanOid(H2O)」に関する研究論文を「arXiv」に発表した。 H2Oフレームワークは、強化学習(RL)を活用してリアルタイムの全身遠隔操作を実現し、人間がヒューマノイドロボットを遠隔操作できるようにするもので、RGBカメラに依存することで、スポーツをする、台車を押す、箱を動かすなど様々な作業を行うヒュ

カナダSanctuary AI、汎用AIロボット供給に向け、カナダMagna International社と戦略的パートナーシップを締結
2024年4月11日、カナダSanctuary AIは、カナダの自動車部品会社Magna International社と戦略的パートナーシップを締結し、Magna社の製造業務のための汎用AIロボットを開発すると発表した。 本提携により、Magna社は、 自動車製造プロセス内の複数のアプリケーションに、Sanctuary AI社のロボットの独自の機能を活用する。 Sanctuary AI社は、製造業及びそれ以外の分野にも変革をもたらす数多くの最先端テクノロジーとして、ヒュー
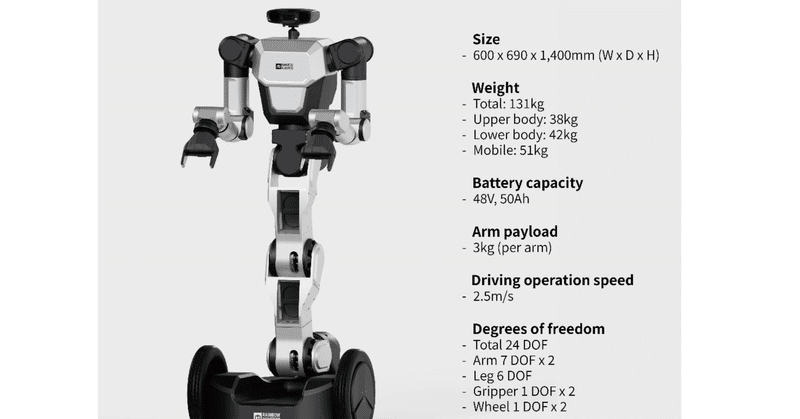
独Rainbow Robotics社、独シェフラー社および韓国電子技術院とAI移動型デュアルアームロボット共同開発の了解覚書を締結
2024年2月22日、ドイツのロボットプラットフォーム企業Rainbow Robotics社は、ドイツのシェフラー社および韓国電子技術院(KETI)とAI移動型デュアルアームロボットを共同開発する了解覚書(MOU)を締結したと発表した。 Rainbow Robotics社は、車輪型ロボットベースの上に人型デュアルアームロボットを搭載した新型移動ロボット「RB-Y1」を発表しており、本契約により、Rainbow Robotics社は、「RB-Y1」を含めたAIベースのロボット