米ヴァージニア工科大学TRECラボ、イタリア技術研究所の人型ロボット「iCub」の歩行安定化に貢献

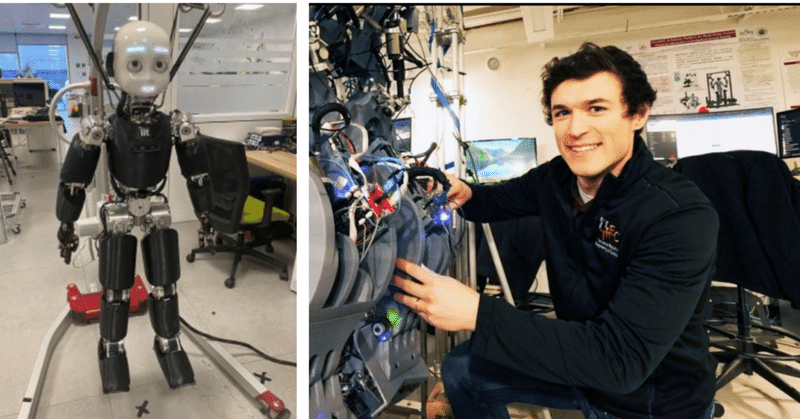
2024年2月21日、米ヴァージニア工科大学は、同大学のTREC(陸上ロボット工学・制御)ラボの研究者が、イタリア技術研究所(Istituto Italiano di Tecnologia)の人工知能・機械知能(AMI)ラボによる遠隔操作人型ロボット「iCub」開発プロジェクトに参加し、アバターロボット開発コンテスト「ANA Avatar XPRIZE」(2022年11月開催)で最終選考に残ったときのストーリを紹介した。
TRECのこの研究者は、2本足ロボットに関する専門知識を活用し、歩行中にかかる力を検知する圧力プレートと各足の位置を追跡するモーションディテクターを備えた靴を採用した新たな制御メカニズムを導入することで、セットアッププロセスを大幅に簡素化した。オペレーターはコンテスト期間中、アバターと約300kmの距離を隔てた場所にいたにもかかわらず歩行中に直立を保つ遠隔操作に成功し、さまざまな用途におけるロボットアバターの可能性を示した。
ジェームズ・キャメロン監督の「アバター」によって広まったロボットアバターのコンセプトは、SFから現実へと移行している。これらのアバターは、映画の中の生物的なものとは異なり、オペレーターが装着する視覚のためのヘッドセット、手の動きのための手袋のような装置、歩行制御のためのモーショントラッキング・システムによって遠隔操作される。この研究成果は論文として、「Science Robotics」誌(2024年1月24日発行)に掲載された。
出典:
2024年2月21日付 ヴァージニア工科大学 プレスリリース(英語)
https://news.vt.edu/articles/2024/02/eng-me-international-robotics-work-connor-herron.html
2024年1月24日発行 Science Robotics(英語)
https://www.science.org/doi/10.1126/scirobotics.adh3834
2024年2月26日付 Robotics & Automation(英語)
https://roboticsandautomationnews.com/2024/02/26/international-work-puts-robot-avatars-on-the-move/80293/