知能って推論より因果獲得が重要では?

人工知能・AI・ディープラーニング。
これらの技術が何か革新をもたらしたのか甚だ疑問なので、一介の運転支援エンジニアが"知能とは何だろね"というテーマで掘り下げてみる記事です。
ニューラルネットは幼少期の知能には近いかもね
ちょい前に流行ったディープラーニング・AIとかって大体ニューラルネットの範疇と解釈しています。学習(training)データとしてラベル付けされた画像データを与えて学習(training)させれば車でもバイクでも何でも高精度に認識してくれるというやつですね。
これって1歳児が知能を獲得するプロセスと似ているんですよね。アンパンマンを覚えて、トーマスを覚えて、大人に「違うよ~これはカレーパンマン」と言われればラベルを修正して再学習するわけです。
「GPU性能向上によりこのニューラルネットの層をめちゃ深くしたら推論精度めちゃ上がったぜふぅ~」をきっかけに、主に運転支援だと物体認識で広く使われるようになりました。物体認識ではね。それ以外では人気ないんですよ、運転支援界隈では。
理由は単純で「推論が対応できるのは極めて簡単なケースのみだから」です。
物体認識以外で使おうとした例として、「入力は画像・出力は人間のステア・アクセルデータでラベル付けして学習すれば自動運転できるんじゃね」という某N社の動画と論文があります。
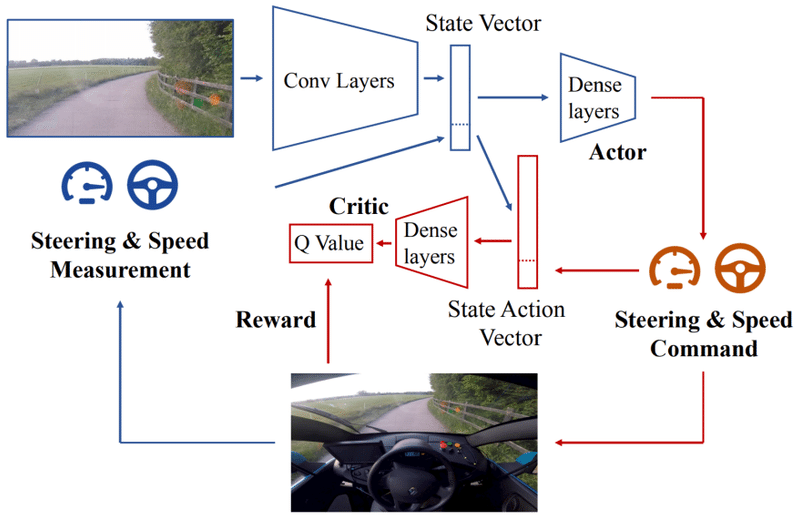
ソース: [1704.05519] Computer Vision for Autonomous Vehicles: Problems, Datasets and State of the Art (arxiv.org)
この手法はけっこう古くから使われていて、遂にGPU精度向上で実現できるか!?と多くのエンジニアが夢を見ました。しかし2016年にこの動画を出して以降、某N社はあまり進捗を教えてくれませんね。
なぜ推論だけでさっさと自動運転できないのでしょうか。(次章で書きます)
運転手は周辺環境を時系列で関連付けている
自分が運転する時、どういう処理を自分がしているのかを細分化してみると、大体既存運転支援システムと似た感じになります。
認識→周辺環境のマッピング→推定→計画→制御ですね。

1906.02939.pdf (arxiv.org)
ここでもし、周辺に車も人も信号もなく道路のみであれば推論だけで全ブロック飛ばして制御できると思います。が、道路には車も人も信号もあります。
右車線が混んでいれば左に急に出てくる車がいるかもしれない
路駐している車に人が乗り込んだらもうじき発進するかもしれない
右折車両がこちらを見ていないので突っ込んでくるかもしれない
路肩の電柱を避けるために歩行者が飛び出してくるかもしれない
教習所で教わる「かもしれない運転」とはつまり、「周辺環境をどう認識し事故原因と関連付けて予測するか」という因果関係の予測事例を示しています。上の例の1つ目をシステムに落とすと例えばこんな感じ:
右車線が同方向車線かつ混雑していることを認識し、後方車両や道路端から回避可能エリアをマッピング、出てくるかもしれない車を位置や速度から予測、出てきたら回避or減速を計画、制御
このシステムは「右車線が混んでいれば左に急に出てくる車がいるかもしれない」という因果関係を前提にした設計です。このシステムも人間も因果に基づいた運転をするので、いろんなパターンの同じ事象に対処可能になります。
しかし推論は、データで学習したケースにしか対応できません。いろんなパターンに対応するにはいろんなパターンのデータを集めるか生成して学習させるしかなく、ニューラルネットが因果を獲得したのかを知る術はありません。「なんかテストデータでうまくいったぞ」しか分かりません。
自分の命を預ける「自分の知能の代わり」を推論ごときにやってほしくない、これがディープラーニングが大して使われない理由です。(※認識では使われてます)
因果獲得できたら「人工知能」と呼称して良い
以上書いた通り、今まともに運用されている自動運転システムの多くは、「人間が獲得済みの」因果をシステムに落としこんで動かしています。人間のように「自分で因果を獲得する」知能はありません。(あったら教えて欲しい)
もし因果を自分で獲得できる知能を開発できたとしたら、それはもはや人の心を一部理解し始めているので、心を持った知能という真の「人工知能」に近づくかもしれませんね。
おしまい。
この記事が気に入ったらサポートをしてみませんか?