SLIMな技術を紹介してみる

前回、月面着陸機SLIMが冬眠に入ったので、一連の顛末を書きました。
今回は補足として、このSLIMに搭載された技術について触れてみます。
まず、SLIMの全体像はこちらの図が分かりやすいです。

個々の技術力も高いものです。特に、宇宙にもっていくには高性能だけでなく、小型化・軽量化が求められ、これらは民間の技術が結集されています。
とくに、今回の売りは降りたいところに「ピンポイント」で着陸できる性能です。そのためには平地以外でも降りれるような工夫が必要です。
アポロ着陸船は、接地部に自動車のサスペンションの役割を持つ関節機能を実装していました。が、これは結構重く大きくなりがちです。
SLIMでは、坂でも着地できるように、下図のように寝かせる方式を採用しました。


たとえ寝かせた状態で着地しても、当然衝撃は受けます。
過去にはやぶさ2号が到着した小惑星は、直径500m程度なのでほぼ重力はない状態です。
つまり、無重力空間のためその着陸制御にはエネルギーをあまり必要としません。(宇宙飛行士が無重力で好きなように動いているイメージ)
一方月は地球より軽いとはいえ、6分の1の重力を持ちます。相対的にエネルギーを使うので、着陸はほぼ一回きりのチャンスです。
今回その一度きりの着陸における衝撃を吸収したのが、3Dプリンタで作られた凸型のスポンジ状の構造です。
これが着陸時につぶれることでショックを吸収するわけです。
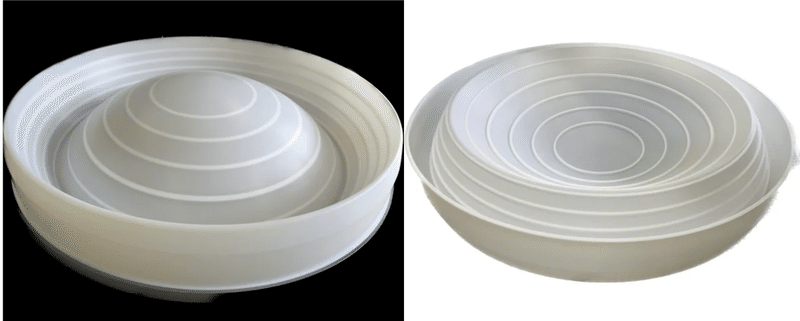
この技術は、(株)コイワイと、日本積層造形(株)によるものです。
今回は、どういう経緯かわかりませんが(多分勢いが強く転がったのかなと想像)90度反転した状態でたたずんでいます。

姿勢を戻せばよいのでは?
との声もネットでありましたが、JAXAの判断としては、この状態で観測を続けることにしています。
姿勢を変えること自体にもなにがしかのリスクがあるのだろうと思います。
ただ、降りたい場所とはいえ自身の位置を把握しないと観測にも支障が出るので、着陸直前に自身で月面を撮影することで位置を把握する能力を持っています。公式サイトからその映像を見ることができます。
ちなみに、画像認識処理は、地上遠隔でなくSLIM内蔵のコンピュータなので、極限環境でも動けるように管理される必要があります。
なかなか画像だけ眺めていると忘れがちですが、月面は寒暖差300度近くまで広がる極限環境です。
この太陽電池を開発したのは民間のSHARPですが、この極限環境を2週間(月の昼と夜はこれぐらい続きます)耐えるのは結構難易度が高いので、たとえ冬眠から明けなかったとしても、そのチャレンジ精神には拍手を送りたいです。
より詳細な技術に関心のある方には下記公式サイトをお勧めします。
この記事が気に入ったらサポートをしてみませんか?